
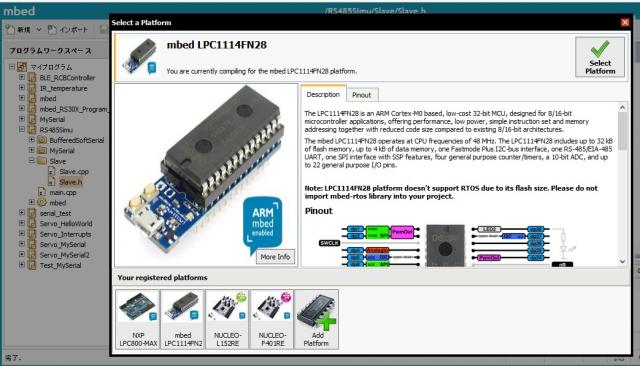
2週間前に製作を開始した、パッシブアッテネータが音出しできるレベルまで完成し、mbedコンパイラを使用したC/C++プログラムでLPC1114マイコンのUARTシリアル通信によるリモコン操作環境ができました。
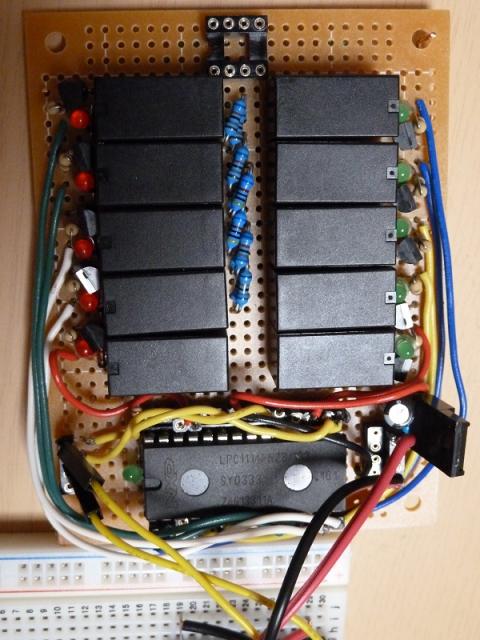
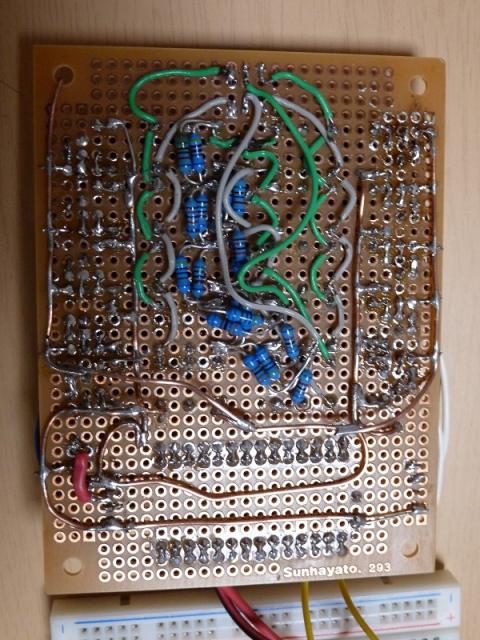
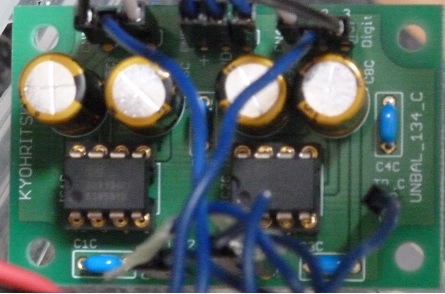
出来上がったレシーバー側のアッテネータ基板、上面も裏面もなかなかの集積度。 自分の実力の割にはだいぶ頑張った感があり。 抵抗は結局、入手が容易な BispaのLGMFSAシリーズを、念を入れてパラで使うこととしました。
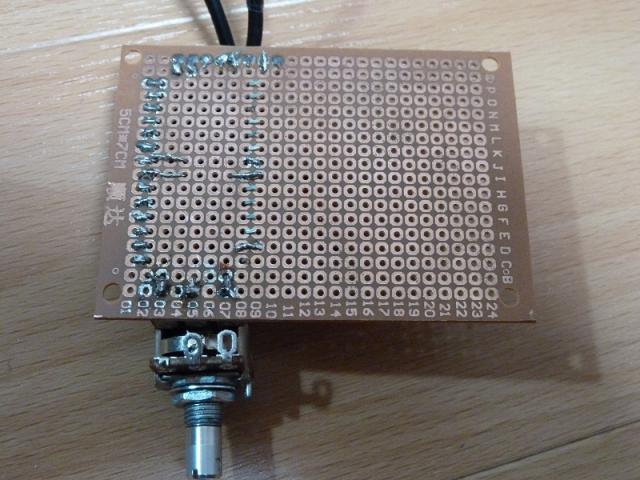
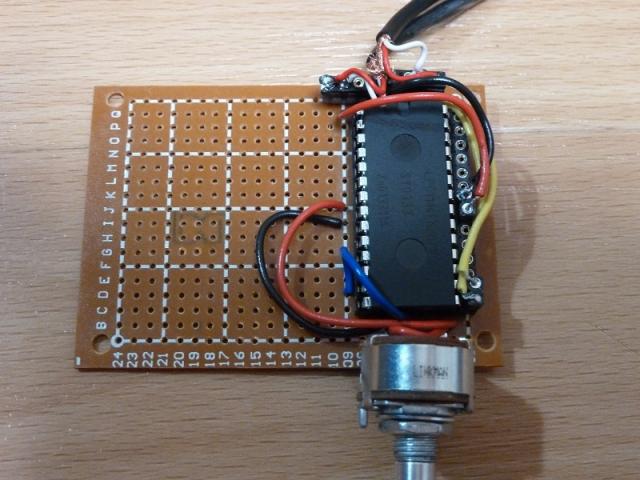
ボリウムを付けたリモコン側は、左側に7セグメントのボリウム表示を装備するつもりでスペースを空けてあります。
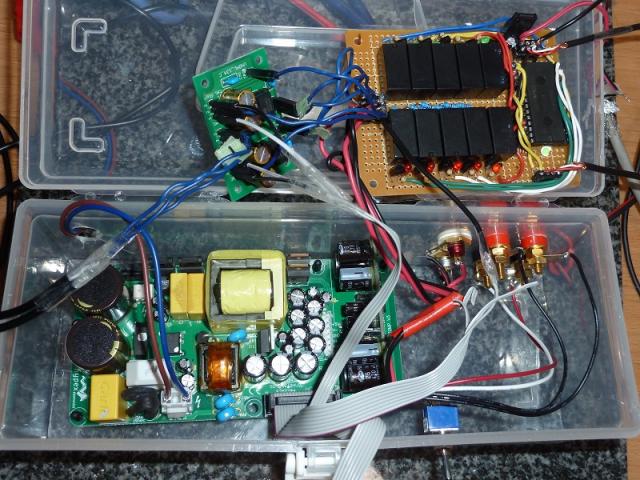
mbedのオンラインコンパイラで、C/C++プログラムをUSB/UART通信を使って適宜デバグしながら、リモコンボリウム側とレシーバー側別々に作っていき、接続してリレー切り替えが問題ないことを確認して音出ししました。

音質のほうですが、これならそこそこ聴けます! まだぼやけた感じですが、エージングですぐに良くなるので、これからが楽しみです。
あと、どうも-8dbの音量がおかしいです。 全体的に2.5dbステップくらいになっている気がする。 ふー。 大変だったけど、やればできるもんですな。
というところまで書いたところで、良く聴き込むと、どうもぱっとしません。
他の抵抗の銘柄を試したわけではないので結論を出すのは早すぎるのはわかっていますが、 ボリウム最大(0db)にして、MoodeAudioプレイヤーで32bitにアップサンプリングしてソフトウエアボリウムで絞るほうが断然音が良いのです。0dbの時でも、例の1個100円のリレー2個が通っていますので、リレーの接点による悪化ではないようです。
高域の質感、低域の空気感、、歴然とした差があり、ちょっとやそっとの改善では太刀打ちできそうにありません。
ということで、ラインアンプを物色していますが、その前に、UcD32MPパワーアンプがバランス入力だということを思い出しました。
こんなの入れたらどう変わるか、ちょっと興味あります。
・・ってことで早速ポチって昨日共立エレショップから届いた、不平衡→平衡変換ラインアンプキット。 さっさとはんだ付けして、接続して音出ししました。

一発で音は出ました。
音質は・・鮮烈だった高域はおとなしくなってしまいましたが、自作STEPアッテネータのdbSTEPが割とまともになり、アッテネータによる音質変化が減りました。音量を絞っていっても、割とまともな音質で鳴っています。 単に全体的に悪くなっただけなのかとも思いましたが、そうでも無いような気がします。
問題としては、不平衡回路のアッテネータ抵抗を通るとノイズが乗ります。 抵抗を通らないSTEPではノイズ無し。 この辺も音質に影響ありそうですね。 FBのごとうさんコメントによれば、GNDループの排除(金属ケース使用の一点接地)、DRV134内臓の50Ωの出力抵抗は合計160Ωになるように外部に110Ω付近で試聴しながら増設、ラインケーブル必須、とのことらしく、まだ調整が必要なようです。
ともあれ、一つの経験値としては、これも有りだと思います。 音の良い平衡ラインアンプ、簡単なのがあれば作りたい。。
難しいですが参考サイト:平衡プロジェクト
 7
7先週、D級アンプのパッシブプリの件を日記にしました。
この記事にも書きましたが、当面の目標はリレー切り替え式のリモコン化アッテネータです。
リレーの接点の品位による音質変化も気にはなりますが、音の良いと言われる接点劣化の少ないリレーは1個500円以上します。 アッテネータで使うと個数が多いので、これだけでhypexのUcD32MPアンプの本体価格と同じくらいになってしまいます。
そのため、できるだけ安いリレーということで、定番(?)のHSIN DA PRECISION の941H-2C を使います。今回はDC5V駆動なので941H-2C-5Vを使用。
しかしさすがにいきなり組み上げてしまってから出てきた音に?マークが付くと困るので、事前に2個のリレーと抵抗を組み合わせて、Lパッド型アッテネーションで音質確認をしておきました。 まあ、劣化している気もしますが、どこが劣化している、というのもわからない程度の、何となくフォーカスがぼやける感じの傾向、というだけでした。 ということで問題無しと判断、このリレーを使います。 秋月で1個100円
さて、回路のほうですが、先日仮に組んだごとうさん式の有接点ロータリーアッテネータ劣化版の回路そのままで良いか、しばし考えました。
- まずは、入力/出力インピーダンスが違うので実際に組み合わせるDACとアンプのインピーダンスで計算したい。
- リレー式なので、音質に影響のある部分への直列抵抗は極力減らせるように考えたい。
途中、不完全な回路でごとうさんのダメ出しをいただき、出来上がったのがこの回路図です。 左下のリレー1個がミソで、ここでR2側に並列に入れるようにして、R1側インピーダンスが上がりすぎるのを防いでいます。なるほどの設計ですね、さすがごとうさんです。
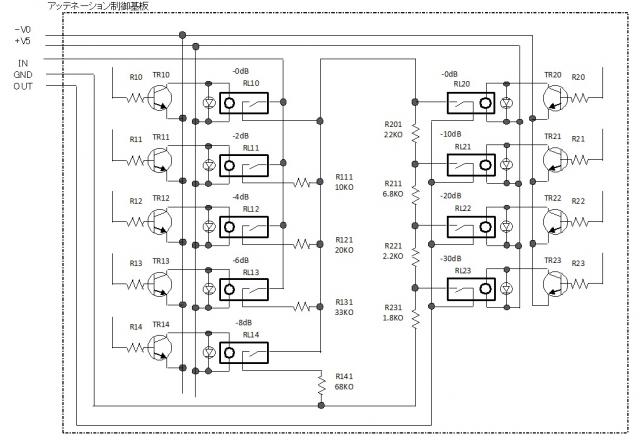
リレー式STEPアッテネータの部分回路図(片ch)
抵抗値の計算は、ごとうさんの案から少し変更かけて、粗々こんな感じ。これからもう少しに詰めます。
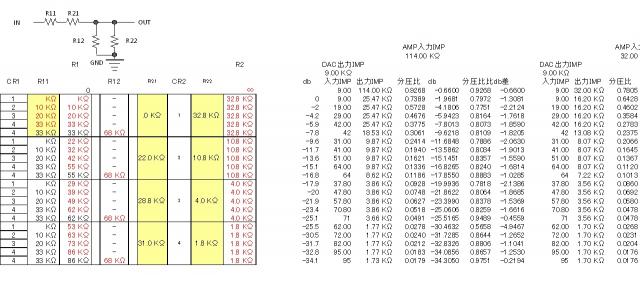
リレー式STEPアッテネータの減衰計算
基板への実装レイアウトの検討。当初は制御回路は分けたほうが良いと思っていましたが、それよりも小型で配線長を短くする方がメリットがありそうです。 でもマイコンまで一緒に乗せるのは単に小型化したいだけなので、本当は別にすべきかなあ。
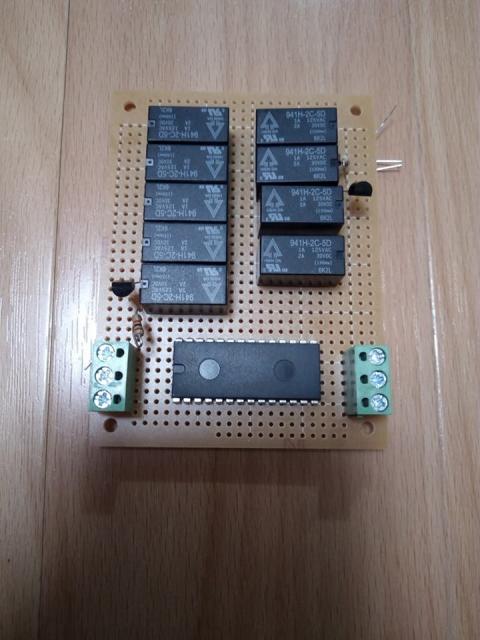
基板上に、リレーとマイコンでレイアウト検討
さて、肝心の使用抵抗ですが、KOAの金属皮膜抵抗(1/2W)とbispaのLGMFS(1/4W)をテストしまして、KOAは無難な音質ながら高域に少々ざらつきあり改善したい、bispaは高域は上品ですが1/4Wだったからか低域の量感が減ってしまいます。1/2Wなら大丈夫なのかな・・
bispaのLGMFSA(1/2W)に行くべきか、他のごとうさんのお勧めを試すべきか、まだ迷っています。
そして、マイコン、ARMのmbedでC/C++を3年ぶりに書くわけですが、開発環境もOSインストール時に真っ新で新たに入れなおさないといけません。(汗) プログラムが出来上がるのはいつの日か?
mbedで色んなことが簡単に出来るだろうことはわかったけど、遊びと勉強ばかりでは面白くないので、仕事に何か応用できないかと考えた。
そこでこの時にVB.netで作ったRS485通信のPC内シミュレータを、mbed LPC1114に移植できれば複数台の通信確認が取れるなと考えて、RS485通信トランシーバIC (TE)SN75176BP とブレッドボードその他を購入しやってみました。 
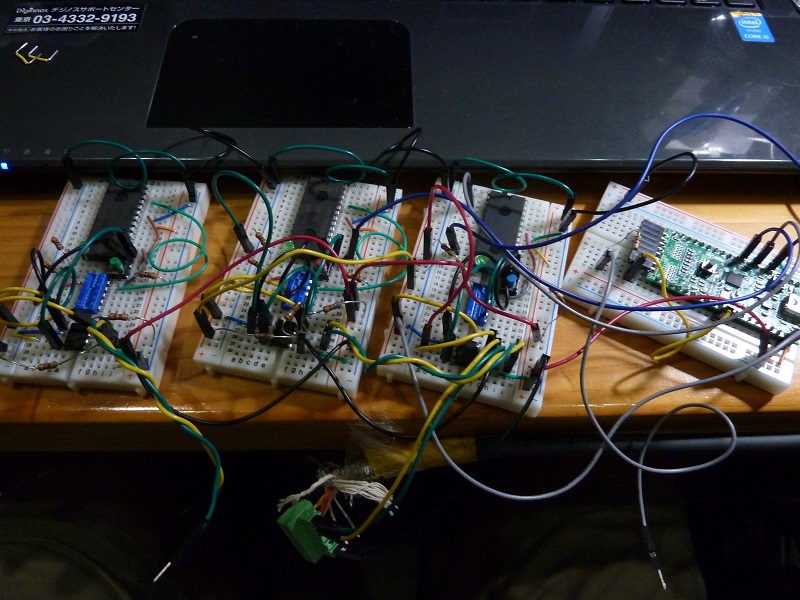
今回は、3台分の機器側に成りすますシミュレータをブレッドボード上に配線します。 ブレッドボード上に1台ずつ、計3枚の普通のブレッドボードが必要。
- 購入部品 (LED、抵抗、配線材などは手持ち品を流用)
名称 型番 購入先 数量 単価(税抜) 普通のブレッドボード EIC-801 スイッチサイエンス 3枚 257円(税込) mbed対応マイコン LPC1114-FN28
生産中止(?)品秋月電子通商 3個 120円 RS485/RS422トランシーバIC (TE)SN75176BP 秋月電子通商 3個 80円 ディップSW 5P 秋月電子通商 3個 60円 タクトSW 各色 秋月電子通商 3個 10円
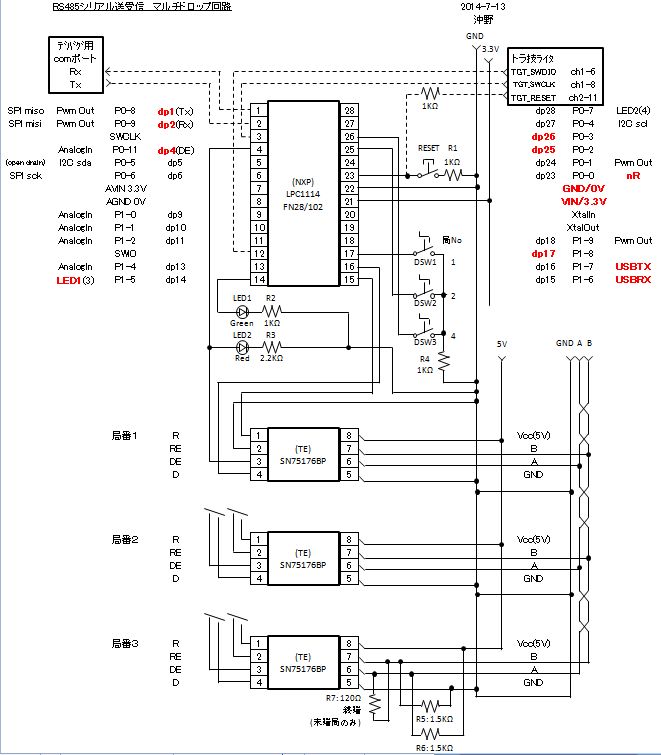
- 配線図
- 電源はトラ技ライタ経由USBから取る。
- ディップSWで局番(今回は1~3)設定可能とする。
- SN75176BPのDE端子は、機器1台なら3.3V印加しておくだけでOKだが、機器2台以上マルチドロップの場合は、マスタからのコマンドに返信するとき以外はバスを解放する必要があるため、マイコンのdp4を返信直前にHigh、返信後20msec後にLowとするソフト処理を行う。
- マイコン側は3.3Vなのでこのままで良いか不安もあったけど動いてるから大丈夫?
- マスタ側ソフトは、このディレイ時間20ms分の待ちが必要。
- この信号のHighの時に赤LEDを点灯させる。
- RS485バスラインのプルアップ抵抗(R5)、プルダウン抵抗(R6)の抵抗値は、実際の路線長で決める必要があると思うのだけど、今回はテストなので小さ目の抵抗を入れてみた。
- 生存確認用にLED1を点滅。 UARTポートと共に割り込みプログラムとする。
 |
- プログラム
- 今回は、仕事の秘匿義務の兼ね合いもあるので非公開です。すみません。
- コーディング・デバグは、ある程度の段階でmbedオンラインコンパイラからエクスポートして、μVision4にて行いました。
- 配線状況
テストなのでヒドイ状態ですね。(汗)下記動画の際には少しだけ整理しました。
- 動画
PLC側のテスト画面と共に映してみました。ボーレートは38,800bps。
機器1→機器2→機器3と通信先を切り替えてサイクリックに通信します。 機器側が受信し送信中に赤LEDが点灯します。 1回のコマンドで1点灯で、点滅回数分のコマンドを処理しています。
今後も仕事で通信案件が来た時には、こんな感じでシミュレータを作って事前テストするですね。 部品単価が安いので、USB/RS485コンバーターを買うよりずっと安価にできますし。 
ここまでテストばっかりやってきたけど、そろそろ実際に動かす何かを作るかなあ。。 
引き続き、mbedをいじってます。
先日入門したばかりでもとても便利と感じるmbedのオンラインコンパイラ。
オンライン上で先人の公開したライブラリやプロジェクトをさくっとインポート出来たり、自分のPC環境に依存しない、デバイス毎に異なる設定などは予め設定済みで、マイコンの種類を変えても少しの変更ですぐに移植できる、などなどとても良くできていて、私のような初級者には大変ありがたいものであります。
しかしですね、、やっぱりIDEでオフラインコンパイル、ステップ実行デバグをやりたいですね。 ということでmbedと先人の知恵を頼ってやってみました。
- 概要
トランジスタ技術2014年3月号には付録にトラ技ライタが付いてくる。 これをEIL-MDK(μVision4)でコンパイルしたバイナリをCMSIS-DAP経由でマイコンにロードするのと、デバグで使います。 UART(USBシリアル)は同時に使えなかったので(やり方がまずかった?)相変わらずFT232RLを繋げています。
もっと楽をしたい方は、素直にSwitchScienceでLPC1114のmbedボードを買ったほうが良いと思います。。たぶん。
→その後、UARTもCMSIS-DAPも同時に接続できるようになり、FT232RLは不要になりました。
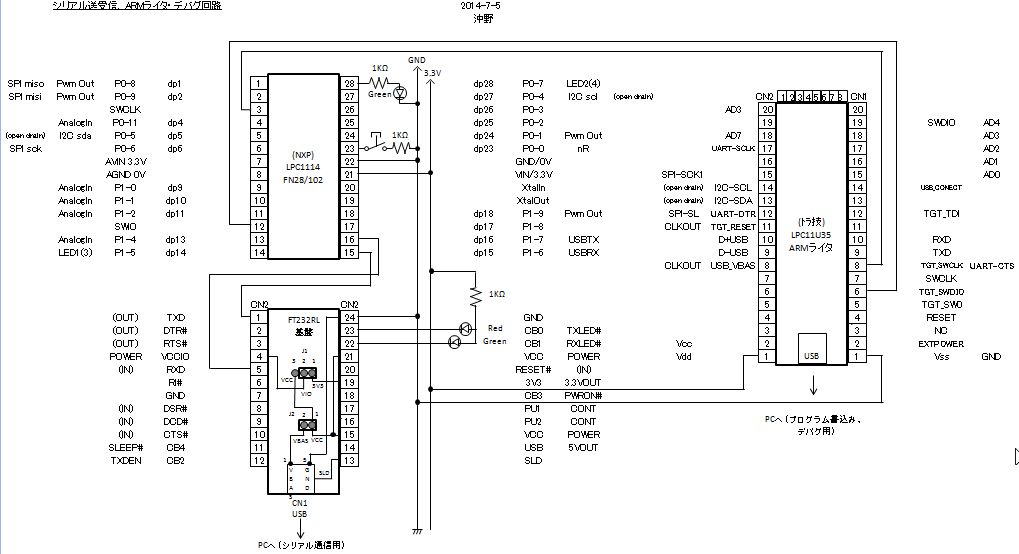
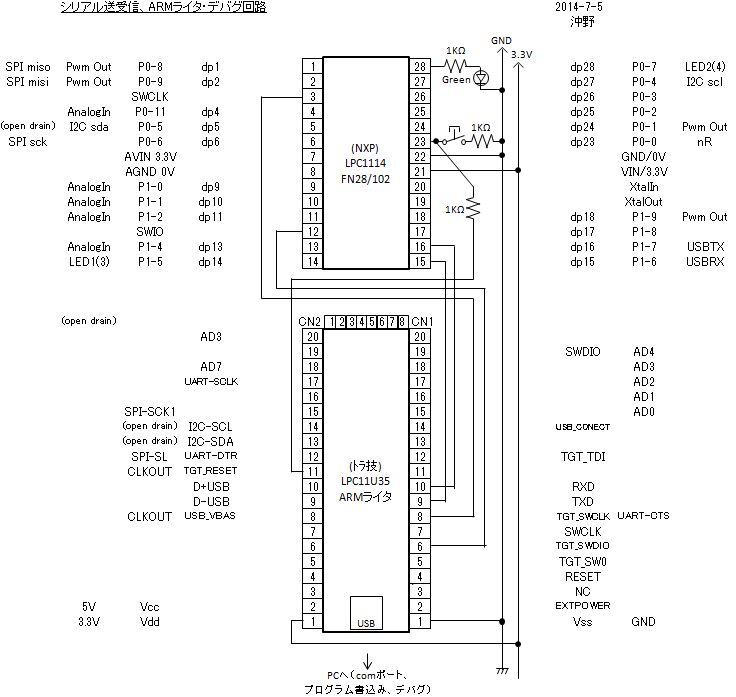
- 接続図
左図ではUART(USBシリアル)用にFT232RLを入れていますが、これは不要になり右図のようにトラ技ライタ側のUARTポートからTx,Rxに繋ぎます。FT232RLあり → なし 
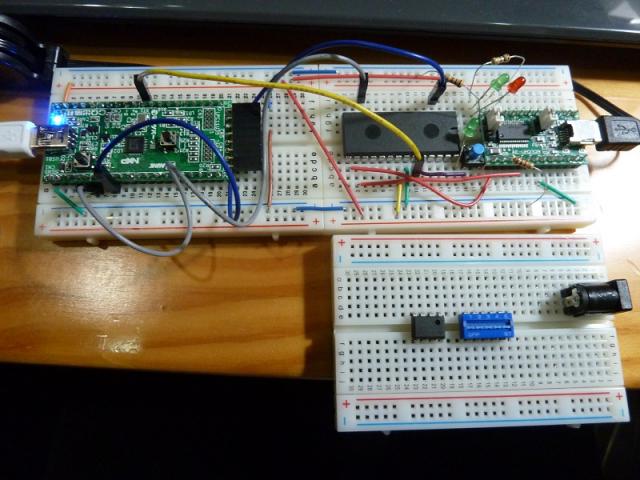
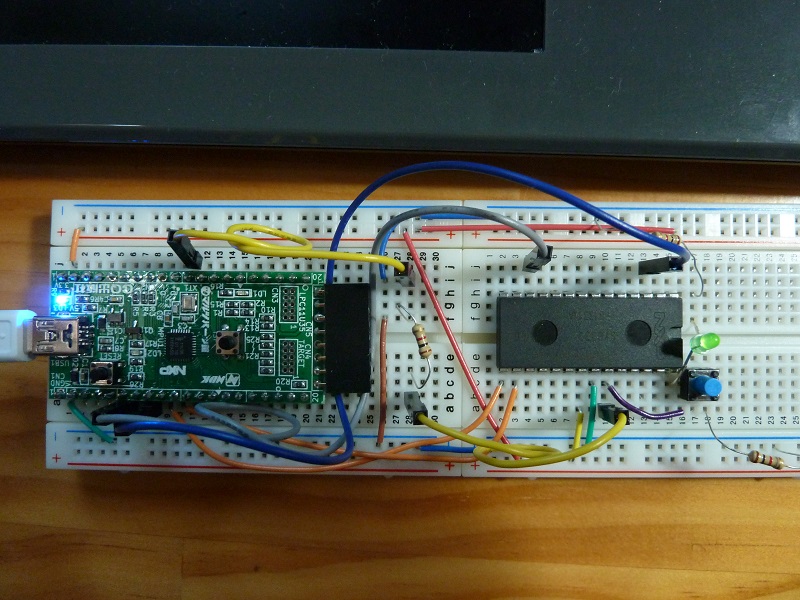
- 現物
左図のブレッドボードの上段左側がトラ技ライタ。右側がLPC1114マイコンとUSBシリアルFT232RL。 右下のは次回テスト予定のRS485ドライバチップとディップSW。 右図はFT232RL無しの最終状態。

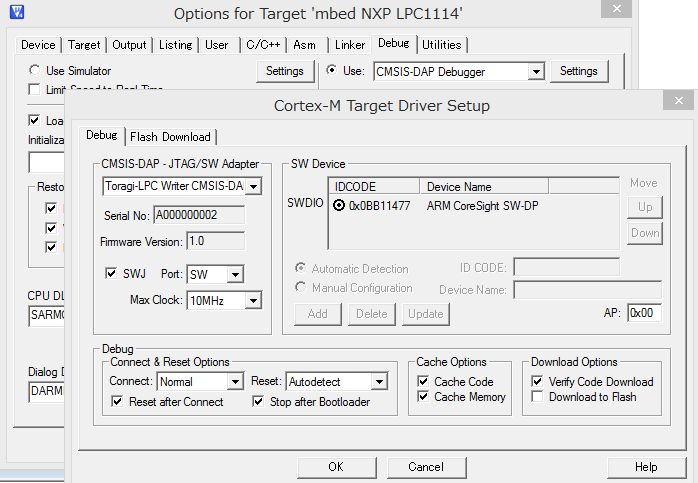
- μVision4でデバグポートにトラ技ライタを指定したところ。 速度は10MHzでも行ける。 μVision5では100KHzまでしか出なくて断念した。
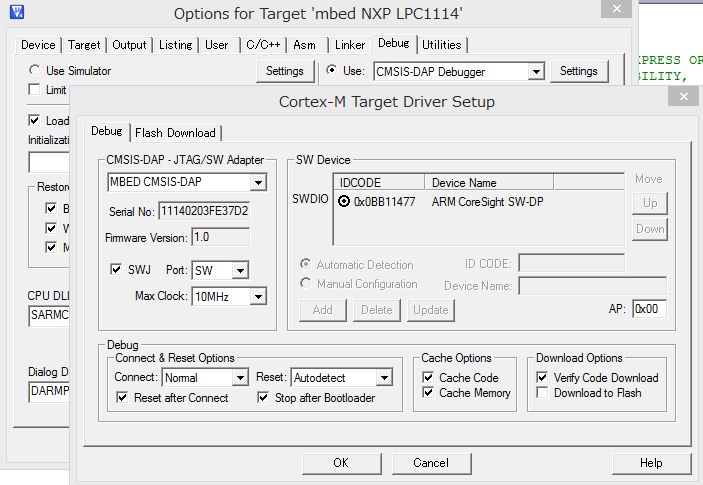
→その後、トラ技のファームウエアではなく、このページのファームウエアに書き換えた後で、トラ技ライタをUSB接続した状態でこのページのUART最新ドライバをインストールしたところ、無事に全て使えるようになりました。 μVision側設定画面はこうなりました。
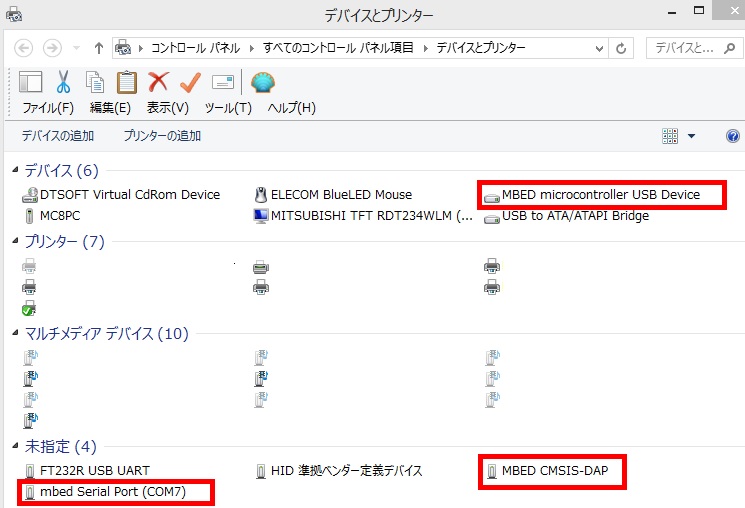
 Windows8.1上のデバイス表示に、3つの接続が出現していればOK。 1つしか出ない場合は、USBドライバがインストール出来ていないです。
Windows8.1上のデバイス表示に、3つの接続が出現していればOK。 1つしか出ない場合は、USBドライバがインストール出来ていないです。

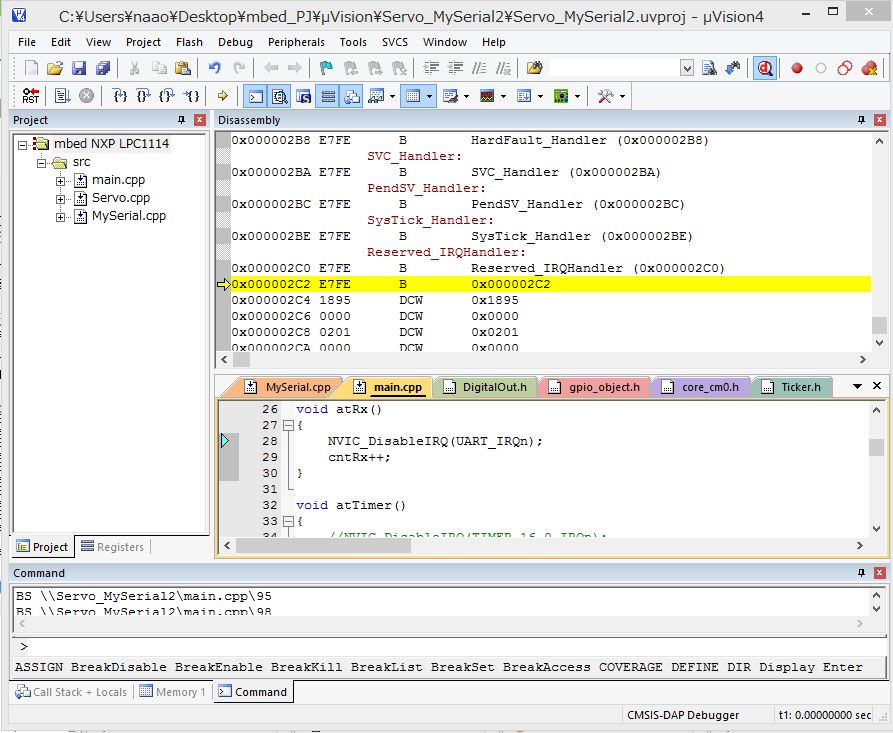
- 割り込みイベントが発生すると、デバグがここで止まってしまい再開不能でマイコンをリセットすることになる。
今のところ解決策がありません、どなたかご存じの方、Help me。
もしかするとリアルタイムOS使っていないとだめなのかな? デバグしなければきちんと動くんだけど・・
→これもトラ技のファームから変えて、さらにnRESET配線1本をきちんと結線することでOKになりました。 nRESETを結線すると、LPC1114に付けたタクトSWでリセットできなくなるので、その際には毎回ライタからのnRESET結線を外してSWを押す、という操作が必要になります。
→上のほうの接続図のようにnRESET中間に1KΩの抵抗を入れることで、そのままリセットも効くようになりました。正しい回路ではないと思いますが、実用上は今のところ問題ありません。
参考:
- トラ技ARMライタを mbed interface にする(LPC1114FN28編)
まさにこれ!と思ってここのファームウエアを試してみましたが、UART(comポート)が出てこない、CMSIS-DAPが出てこない、という状態で断念。 PCがWindows8.1だからかなあ。。
→再度試したところ、下記ページにあるUARTドライバをインストールしたら全てOKになりました。
但し上のページの結線は、何かおかしいです。nRESETの配線が別のところへ行っている気がします。- μVision4でデバッグ!(mbed-MACRUM)
トラ技ライタでは無くファームウエアはここのものは使いませんが、作業の流れはこれが近いです。ファーム書き換え後のUARTドライバはここからダウンロードしてインストールします。 - Keil MDK-ARM v4 のダウンロード
このページのv4のリンクより。 ライセンスフリー版では32Kbの制約があります。v5は通信速度が出なかったです。→これも再度確認したら問題ありませんでした。 - mbedをIDEで使う(野良2-mbed)
μVision4のあたりが詳しいです。
- μVision4でデバッグ!(mbed-MACRUM)
- トラ技のページ
ファームウエアはここから「トラ技ARMライタ基板をCMSIS-DAP(デバッガ)として使うときのファームウェア」をダウロードして流し込みます。→当初はこれでやっていましたが、後で別のファームでOKになり不使用です。- トラ技2014-3月号
ここでまだ買えます。(マルツパーツ館) - 部品セットはここで買えます。(マルツパーツ館)
- トラ技2014-3月号
次回は、この時に仕事で作ったPC上のVB.NetなRS485シミュレータを、LPC1114マイコンに置き換えて通信してみるテストです。
まずは現物から
- LPC1114FN28とFT232RL USB/serialコンバーターで、シリアル通信+サーボモーターを回してみる。
以下、準備から実際のプログラムソースまでメモっておきます。

まず頭に入れてくべきこと 
- mbedオフィシャルサイト 全てはここから始まる。
- mbedとは:Wikiedia
- mbed と Arduino の違い
準備したもの
- mbed対応のマイコン。今回は、LPC1114FN28 を、秋月電子で購入。 1個たったの120円!(税込)
- USB-シリアル変換モジュール FT232RL 秋月で購入。
- Arduinoスターターキット SGK-ARD-KIT 千石電商で購入 arduino uno 付きで4,940円。 arduino unoの他に付属のセット品が色々入っていて、初めてには良いですね。 arduinoからいじり始めてみたものの、mbedを教えていただいたら断然そちらが面白くなってます。
配線
- 参考
- mbed LPC1114でLチカしてみた(1):しなぷすのハード製作記
マイコンとFT232RLの接続が参考になります。 プログラムを書き込んだあとリセットしなくても済みます。 なお、書き込みソフトはこのページの要領ではなく、LPC1114限定で下記ページのものが使いやすいです。 - mbed LPC1114でLチカしてみた(2):しなぷすのハード製作記
LPC1114限定で「LPCISP」というソフトを公開しておられます。USB/serialコンバーター経由で一発書き込み、即座にリセットが働くので、楽ちんです。")
- mbed LPC1114でLチカしてみた(1):しなぷすのハード製作記
")
- ハード図
ブレッドボードを使うとテストは楽にできるけど、一度バラしたら再現するのが面倒になっちゃいますんで、ちゃんと図面を書くクセをつけたいですね。今回は資料への使いまわしがしやすいようにEXCELでこんな感じで書いてみました。- LPC1114のLED回路はソース出力(PNP)でプラスコモン、FT232RLのLEDモニタ回路は、シンク出力(NPN)でマイナスコモンになっているみたいで、ちょっと混乱します。
工業用制御部品に関していえば、日本国内やアジア圏ではシンク(NPN)でマイナスコモン、欧州ではソース出力(PNP)でプラスコモン が多いですが、欧州への輸出時にはCEマーク表示の関係で本質安全の考え方から必ずPNPにしないといけなくなるため、国内でもPNPへの変更が徐々に進んでいる・・ のかなあ?
組み込み部品での状況は全くわからずです。
- LPC1114のLED回路はソース出力(PNP)でプラスコモン、FT232RLのLEDモニタ回路は、シンク出力(NPN)でマイナスコモンになっているみたいで、ちょっと混乱します。
") |
 |
プログラム
mbedはarduinoと違い、ほぼ素のC/C++で書けます。 オンラインコンパイラでビルドが通ったプロジェクトをエクスポートして、外部のIDEで編集・コンパイルできることからもそれを実感できます。
とはいえまずはオンラインコンパイラで。
") |
使用ライブラリ
- Servo
mbedのオンラインコンパイラ上の「Import」でキーワード「Servo」で検索し、sford cstyles さんの mbed R/C Servo Libraryを試しに使ってみました。 - MySerial
自作ライブラリ MySerial です。mbed標準のRawSerialクラスを継承し、受信文字列のchar配列格納を簡単にできるようにしてみました。 現時点でのソースを貼っておきます。- GetString メソッドは、テンプレート化でオーバーロードしてあり、引数にポインタ変数指定でも char配列指定の参照でも使えるようにしました。
- Wait時間の設定を追加してあります。
その他APIは、こちらを参照。
- MySerial.h


1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82
- | | | | | | | | | ! - | | | | | | | | | | | | | | | | | | | | | ! - | | - | | | ! | | - | | | ! | | - | | | | ! | | - | | | | ! | - | ! | | | | | !
/** mbed Serial Library extend RawSerial * Copyright (c) 2014 Naoki Okino * * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, * FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE * AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER * LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, * OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN * THE SOFTWARE. */ #ifndef MBED_MYSERIAL_H #define MBED_MYSERIAL_H #include "mbed.h" /** MySerial control class, based on a RawSerial * * Example: * @code * #include "mbed.h" * #include "MySerial.h" * * MySerial pc(USBTX,USBRX); //instance of MySerial Class * char cWord[16]; //receive chars or cWord[256], cWord[1024] etc.. * * void readbuf() * { * // int iRtn = pc.GetString(6,&cWord); //Serial received chars by pointer cWord * int iRtn = pc.GetString(6,cWord); //Serial received chars byref of cWord * } * int main() { * pc.baud(9600); //set baud rate * pc.format(8, MySerial::None, 1);//set bits for a byte, parity bit, stop bit * pc.SetRxWait(0.01, 0.001); //set wait getting chars after interrupted, each char * pc.attach( readbuf, MySerial::RxIrq ); //Set Interrupt by Serial receive * } * @endcode */ class MySerial : public RawSerial{ public: /** constructor to get chars received by serial * * @param PinName tx * @param PinName rx */ MySerial(PinName tx, PinName rx); /** set wait getting chars after interrupted * * @param float _fRxStartWait wait getting a 1st char after interrupted * @param float _fRxEachWait wait getting each char */ void SetRxWait(float _fRxStartWait, float _fRxEachWait); /** function to get chars after received chars by serial * * @param int size for get chars * @param *cWord returns got chars by pointer * @param returns success by 0 */ virtual int GetString(int size, char *cWord); /** overload function to get chars after received chars by serial * * @param int size for get chars * @param cWord returns got chars by ref * @param returns success by 0 */ template <class X> int GetString(int size, X cWord) { return GetString(size, &cWord); } protected: float fRxStartWait; float fRxEachWait; }; /* class MySerial */ #endif
- MySerial.h
- MySerial.cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
- | | ! - | | ! - | | | | | | - - | ! | - | - ! | | ! !
#include "MySerial.h" MySerial::MySerial(PinName tx,PinName rx):RawSerial(tx,rx) //constructor { fRxStartWait = 0.01; //wait getting a 1st char after interrupted fRxEachWait = 0.001; //wait getting each char } void MySerial::SetRxWait(float _fRxStartWait, float _fRxEachWait) { fRxStartWait = _fRxStartWait; //wait getting a 1st char after interrupted fRxEachWait = _fRxEachWait; //wait getting each char } int MySerial::GetString(int size, char *cWord) //by pointer { int i=0; int ichar; memset(cWord, '\0', strlen(cWord)); //initialise chars wait(fRxStartWait); while(1) { if(!readable()) { break; } ichar = getc(); if(i<size) { cWord[i] =ichar; //putc(ichar); } i++; wait(fRxEachWait); } return 0; }
- MySerial.cpp
メイン
- シリアルコマンド
ただの実験なので、<STX><ETX>などの制御コマンドは一切無しです。(汗)- 「start」で開始
- 「pxxx」(xxxは角度)で位置決め
- 「stop」で停止
です。
- 受信の割り込みと、50ms定時タイマ割り込みを受けてメインで動作及びLチカさせてみました。
- 割り込みのIRQ変数名は、シリアルが「UART_IRQn」、定時タイマが「TIMER_16_0_IRQn」でしたので、割り込み優先度や割り込み禁止を個別に管理できます。 この辺の定義は、こちらに全部書いてありますね。
- まだ試していませんが、フロー制御を入れないと9600bps以外では取りこぼしが発生します。
- ソース
volatile のつけ方などわかっていないので、まだ適当です。- main.cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101
- | | ! - - ! ! - | | - ! | - | | - | | - | | | - | ! - | | ! ! - | | - | ! | | | | | | | | | | - | | | - | | | ! | | - | - | | ! | - ! ! !
#include "mbed.h" #include "Servo.h" #include "MySerial.h" Servo myservo(dp18); MySerial pc(USBTX,USBRX); //instance of MySerial Class Ticker timer; DigitalOut led2(LED2); //alive check LED volatile int cntRx=0; volatile int cntRx_old=0; volatile int timeUp=0; volatile int timeUp_old=0; char cWord[6]; //receive chars or cWord[256], cWord[1024] etc.. char *pCword = cWord; //pointer for cword const char ccStart[6] = "start"; const char ccStop[5] = "stop"; const char ccMove_[2] = "p"; int readSize = 5; int doStatus; int iDeg; void atRx() { NVIC_DisableIRQ(UART_IRQn); cntRx++; } void atTimer() { //NVIC_DisableIRQ(TIMER_16_0_IRQn); timeUp++; } void readbuf() { pCword = cWord; //pointer for cword //int iRtn = pc.GetString( readSize, &cWord[0] ); //Serial received chars by pointer of cWord int iRtn = pc.GetString( readSize, cWord ); //Serial received chars byref of cWord if(strcmp(cWord, ccStart)==0) { // start doStatus=1; printf("started\n"); } else if(strcmp(cWord, ccStop)==0) { // stop doStatus=0; printf("stopped\n"); } else if(cWord[0]==ccMove_[0]) { // 1st char matches pCword++; // increment pointer to get after 2nd chars iDeg = atoi( pCword ); printf("%d\n",iDeg); } else { //no action except for start/stop printf(" no match %s\n" , cWord); } if ((doStatus == 1) && (0 <= iDeg) && (iDeg <= 180)) { wait(0.01); // waits for the servo to get there myservo.position(iDeg - 83.0); } } int main() { pc.baud(9600); //set baud rate pc.format(8, MySerial::Odd, 1);//set bits for a byte, parity bit, stop bit //pc.format(8, MySerial::None, 1);//set bits for a byte, parity bit, stop bit //pc.set_flow_control(MySerial::RTSCTS,dp26,dp25); pc.SetRxWait(0.01, 0.001); //set wait getting chars after interrupted, each char wait(0.25); //startup wait pc.attach( &atRx, MySerial::RxIrq ); //Set Interrupt by Serial receive NVIC_SetPriority(UART_IRQn, 120); timer.attach( &atTimer, 0.05 ); NVIC_SetPriority(TIMER_16_0_IRQn, 10); myservo.calibrate(/* range */ 0.00099, /* angle +/- */ 90.0); while(1) { wait(0.01); if(cntRx != cntRx_old) { readbuf(); cntRx_old = cntRx; NVIC_EnableIRQ(UART_IRQn); } if(timeUp != timeUp_old) { if( 10 <= timeUp ) { led2 = !led2; timeUp=0; } timeUp_old = timeUp; //NVIC_EnableIRQ(TIMER_16_0_IRQn); } } }
- main.cpp
")




