なーお さんの日記

 前の日記
前の日記

先月の水戸黄門漫遊マラソンに続く今シーズン2レースめ、つくばマラソンを走ってきました。
昨年は故障のためスタート直後に棄権して応援に回った悔しい大会です。 記録を狙う大本命レースと位置づけ、春から中強度走を中心に走り込んで育てた有酸素運動能力と、磨き上げてきた走法を全開で解き放ち、昨年の悔しさをぶつける格好の舞台です! 
状態の確認
- ベスト体重±0.5kg維持(カーボローディング分を除く)、体調良好
- 出張中3週間の晩ごはんは、毎日イオン魚屋の握り寿司とオニオンサラダ2袋で血液サラサラ。心拍負荷を抑え、フル終盤の脱水状態においても血流の悪化を低減。
- ランニングフォームが安定し再現性高く調子良し
- 気温もあまり上がらない予報。
と、これはまたとない絶好のチャンス到来で、ネットタイム自己ベスト(3:28:19@2018湘南国際)更新へ自信を持ってトライ。キロ4:54で5キロ毎ラップ24:30を基準に走りました。
結果
最初に、応援ナビに沢山の声援をいただき、ありがとうございました! ゴール直後に見たら、ほんとに泣きそうになったです。
そして結果です。残念ながら絵に描いたように失速し、PB更新どころかBプランのサブ3.5も未達、Cプランの3:35切りもできず、どうにかDプランの3:40切りの、先月の水戸黄門マラソンのタイムとほとんど同じでゴールとなりました。
その後調べてみると、2022年の第42回大会より少し良かったので、嬉しさは全くありませんが自己コースベストとなります。
- タイム
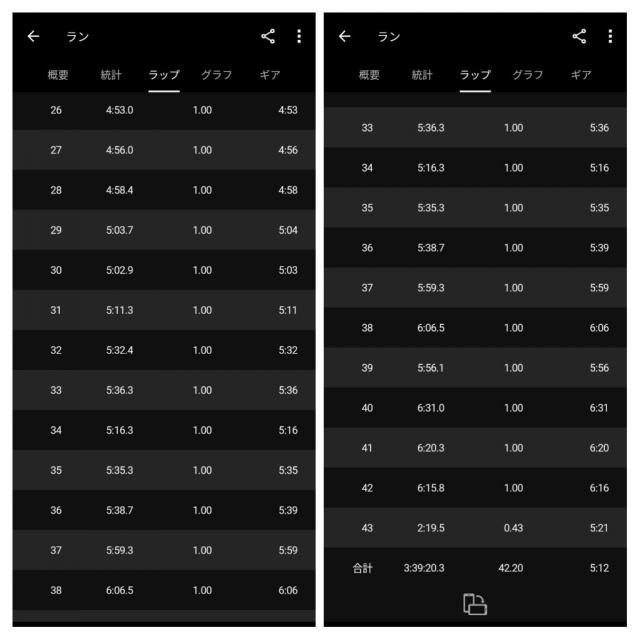
- グロス 3:39:55
- ネット 3:39:18
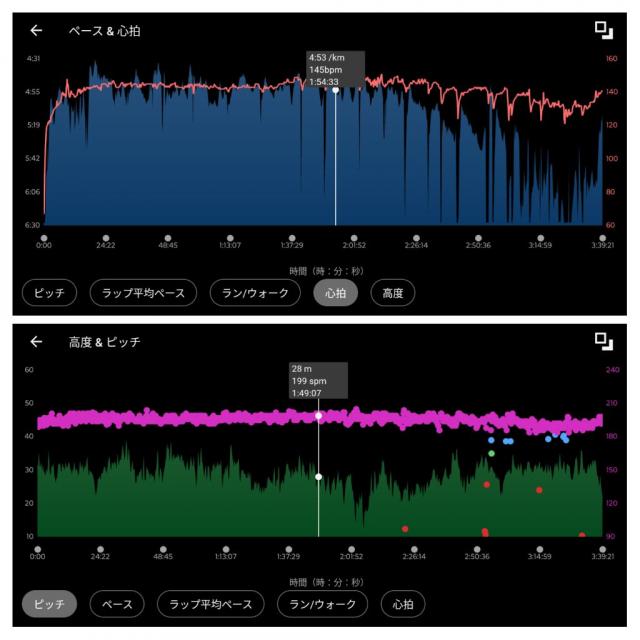
- GPSログ(Garmin)
タイムリスト この記録は速報(参考記録)です
| 測定ポイント | スプリット | ラップ | 通過時刻 |
|---|---|---|---|
| Start | 00:00:37 | 09:10:37 | |
| 5km | 00:25:37 | 0:25:00 | 09:35:37 |
| 10km | 00:49:58 | 0:24:21 | 09:59:58 |
| 15km | 01:14:28 | 0:24:30 | 10:24:28 |
| 20km | 01:38:48 | 0:24:20 | 10:48:48 |
| 中間 | 01:44:10 | 10:54:10 | |
| 25km | 02:03:13 | 0:24:25 | 11:13:13 |
| 30km | 02:28:28 | 0:25:15 | 11:38:28 |
| 35km | 02:55:57 | 0:27:29 | 12:05:57 |
| 40km | 03:26:35 | 0:30:38 | 12:36:35 |
| Finish | 03:39:55 | 0:13:20 | 12:49:55 |
     |
レース振り返り
起床~現地入り、スタート前
3時半起床、モルテンドリンクを少しづつ半分飲む。残りは朝食少し前と、朝食後30分以上経過してから摂取。
トイレも自宅で2回、つくば市役所駐車場の仮設トイレで1回。現地では着替えた後に、D/Eブロックのスタート付近で。
現地でS氏、O氏とおちあい、互いの健闘を願ってそれぞれのブロックへ
わたしはFブロック、第3ウエーブスタートで、Aブロックの10分後に号砲です。ここに立った時は、カーボローディングもトイレマネジメントも完璧だったし、サブ3.5の確率は6割くらいある、と思っていましたが、現実はそう甘くなかったです。
 |
スタート~10Km
この時期、筑波大学構内の紅葉は綺麗ですね。走っていると更に見とれてしまうエリアもあり、往路は気持ちを落ち着けて入れました。
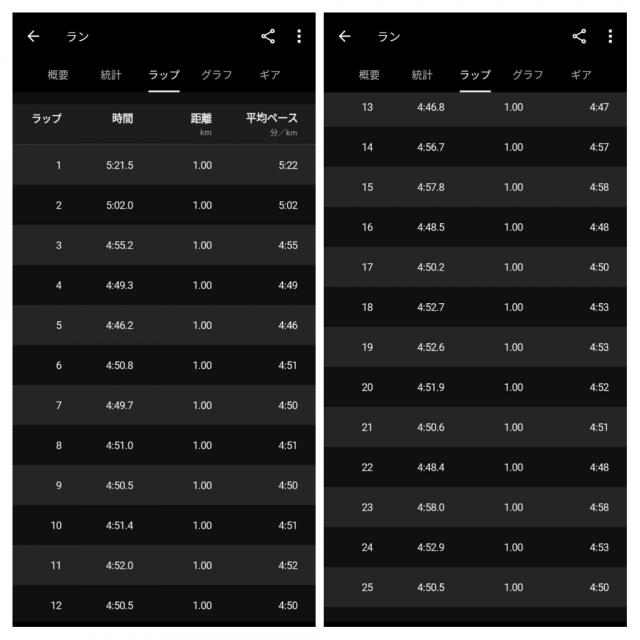
最初の1kmは5:21、その後5kmまでスピードアップし、5kmを25:00で通過。 5~10km間は前に吊られて引っ張られる形でそのまま速度を維持して、ラップ24:21で通過、少し早すぎ。
10Km~20Km
前ラップが早すぎたので、一旦落ち着かせてフォームをチェック。特に問題なく、脚を下ろすことで前に進む感覚も得て走れている。ラップは24:30,24:20。
20kmのラップが早くなった理由は、3.5ペーサーの風船が100m先に見えてしまったので、徐々にでも追い付きたい、という欲がでたからです。 思い返せばここで欲張って脚を使ったのかもしれません。15km過ぎでアミノサウルス投入1回目。
20Km~30Km
3.5ペーサー風船に追い付きたい気持ちと裏腹に、なぜか前腿が張り始めます。「なんで~? ちゃんとお尻MAXで重心着地、出来てるよねえ。。」という心の叫びをあざ笑うかのように前腿の張りはひどくなってゆきました。26km付近でアミノサウルス投入2回目。27km付近でコムレケア投入1回目。
30Km~ゴール
30kmを通過する頃には、既にキロ5分を切れなくなっていました。何とか粘りたいとフォームを骨盤前傾・腰椎しなりから腕引き上げ連動で頑張るも、脚が言うことを効かないもどかしさ。32kmあたりだったか、モルテンジェル投入。
35kmを通過すると、もうキロ6分台がやっと。ガトリングペンギン腕振りで必死に前に足を送ろうとしますが、もう限界・・
でもやっぱリ思い出すんです、オンラインのラン仲間のレースで自分からの応援、その時の言葉が、そのまま自分の頭にこだまします。皆さん応援してくれている、頑張って歩かずにゴールするんだ!
時々止まって、痛い脚を屈伸してまたすぐ走り出す、これを2~3回やりました。 たまに歩きもしましたが心拍数が落ちる前に小走りに移行し復帰、そんな繰り返しでどうにかゴールまでの距離を少しづつ縮めていきました。37km付近でコムレケア投入2回め。
最後はスパートのスの字もできず、ドロドロとゴールしました。キツかったですが、今回のチャレンジに後悔はありません。
 |
考察
水戸の時にはここまで前腿に負担はかかっていませんでしたので、原因が何かあるはず。。ペースが速くなったぶん着地衝撃が大きくなったためか、骨盤前傾バネを強く発揮させるためにお尻MAXではなく前腿を使っていたか、はたまた単に歳のせいでこんなスピードで30km以上はもう無理なのか。。
走法意識
#include(): Limit exceeded: inc/marathon/走法意識/20241124今回、良くも悪くも上記の意識を持って走った結果が表れたと思っています。走法意識は大事ですが、1月の勝田までに原因探索と修正、できるかな。。



