日記一覧
当サイトに登録されている日記一覧



工場設備のソフト製作には様々な課題があるけれど、技術論や精神論を超えたところに「まず動くようにすること」の重要性がある。
久しぶりに、simulatorと向き合って仕事をすることになっているので、今日はこの話題にお付き合いください。
simulationを行うことは、実際の立ち上げ業務を速やかに行うために今や非常にウエイトが高いといえる。 5年前にシーケンサのシミュレータ という記事を書いたときにはまだまだ認識が低い人も多かったが、最近では「少なくともシーケンスとタッチパネル間のバグアウトくらいはsimulationかけておいてね」が常識になりつつある。
一昔前になるが、豊田スタジアム のソフト作成・現場仕様変更には、物を動かすまでテストができない状況もあり、simulatorが大変強力な武器であった。 ただ、この時の方式はsimulatorそのものをVisualBasicで作ったので、応用性とか 他のメンバーによる改造には不向きなシステムだった。。
現在携わっているのは、ブラックボックス化された古い制御装置のレトロフィット(置き換え)の案件。 この場合、「今まで動いていた装置」であり、置き換え後に許される立ち上げ時間は短く、そしてバグによって機械を壊すことは即生産阻害に繋がる。
まさにsimulatorに期待される場面なのだが、今回はできるだけ簡便に、且つ改造が容易な方法でやってみた。
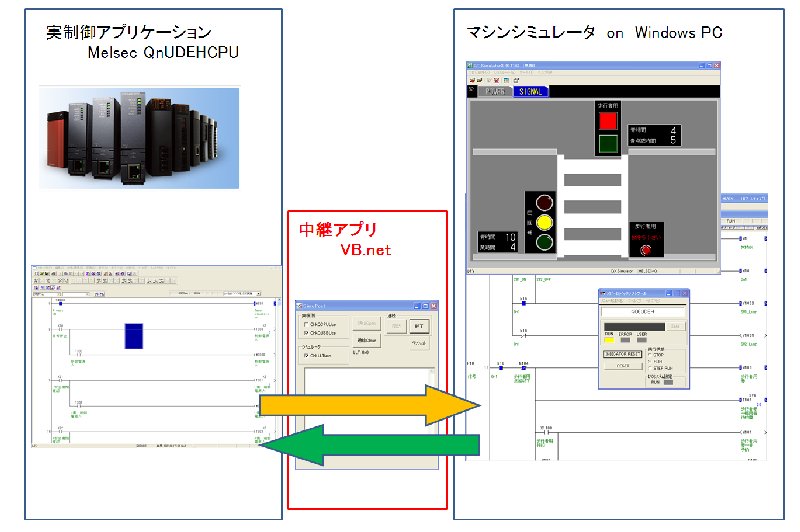 画像のように、制御装置のシーケンサと通信するポスト通信アプリケーションをVB.netで作ってPC上で動かす。一方で同PC内で実体の無いsimulator側シーケンスをGX-simulator上で稼働させ、電磁弁・シリンダモデルや、サーボ位置モデルを動かして、結果をポスト通信アプリ経由で実シーケンサに返すもの。
画像のように、制御装置のシーケンサと通信するポスト通信アプリケーションをVB.netで作ってPC上で動かす。一方で同PC内で実体の無いsimulator側シーケンスをGX-simulator上で稼働させ、電磁弁・シリンダモデルや、サーボ位置モデルを動かして、結果をポスト通信アプリ経由で実シーケンサに返すもの。
このようにしておけばsimulator自身はシーケンスで書けるので誰でもメンテできるし、実ソフトとsimulatorは完全分離できるため転用性も向上する。

USBディスプレイアダプタを購入し、3画面体制
ということで、9月に制御盤出荷予定の案件で、これを十分に活用してソフト製作に取り組んでいる。 simulatorソフト製作は案外面倒で、バグアウトが目的なのかsimulator製作が目的なのか、わからなくなることもあるのだが、今回の方法が今後のsimulation環境へプラスになることを期待している。
# 自分の仕事の歩みは、simulatorとの付き合い方の変遷という部分も大いにある、と思うこの頃。
タグ ESXi 自鯖
今日は、年に2回開催のソフトテニスの杉並大会(クラブ戦)に大学のOBとして参加してきた。
ここ2か月の減量も成功し、止まっていた足の動きが復活。 ボレーの成功率が下がってきたのが少々不安材料であったが、足でカバーできるさ、くらいの気持ちでいた。 髪も染めて(笑)若い気持ちで臨んだが。。
パートナーは現役で一番ストローク力のある後衛と組ませていただき、2試合に出場。1試合目は相手のレベルが高すぎて完敗。2試合目は勝てる相手・勝てる試合であったのだが、後衛の頑張りだけでは接戦を制せなかった。
ボレーの成功率は、2割程度であっただろう。 触ってもミスか、落とすだけしかできずに決まらずグシャグシャになって結局相手のポイントに。 触ったボールの半分でも決めていたら、すんなり勝てていたはずだ。
今回の自身のプレーを冷静に評価してみる。
- 足の動きに頼る気持ちが強すぎ、ここ数年減っていた余分な動きが復活。 自制できずに要らんところでサイドやミドルを抜かれ、後衛の守備範囲を広げてしまった。
- 減量のトレーニングで体が軽くなり、動きが早くなったぶん、相手がボールを打つ瞬間に眼がブレて軌道の認識が遅れ、ラケットにきちんと捉えられないことが多かった。
- 減量で足腰は強化された反面、上半身の筋力が下がってしまい、あれほど軽量なラケットなのに思い通りに扱えなくなってしまった。
- 成年・シニアの試合に慣れてしまって、速いボールに対応できない体になりつつある。。
- 入れるだけの1stサーブはやはり辛い。2試合でダブルフォルトが無かったのが唯一の救い。
まことに不甲斐ない出来で、パートナーにも応援している皆さんにも申し訳なかった。
今後は、上半身の筋力維持にも努めてみようと思う。動体視力の維持も重要。 べち君に今日も助言いただいたテニススタイルの変更は尤もではあるのだが、(今更ということもあって)なかなか難しい。 (身長の無い前衛ゆえ、ポジションを取るだけでは相手にプレッシャーを掛けられないという宿命も大きい。)
なお、自分も含め他の皆さんの試合、それぞれに楽しんでできのではないかと思う。 毎度この場を提供してくれる幹事さん、ありがとう。
 2
2本日、所用で会社を休んで、そのついでにコンテスト用スピーカー「トルネードフライ」を音楽の友ホールに配達してきました。
宅急便で送ればよいのになぜそうしたかというと、スピーカーを寝かせた状態で振動を与えると、第二ダクトのスパイラル部分が抜けてゆく気がしていたからです。 自分で運搬すれば、配達先で確認し万一抜けていたら差し込むことができます。
コンテスト視聴会終了後の返送は、ダクトが抜けても気にする必要が無いので、プチプチぐるぐるで構わないと伝えました。
午後一に香取市を出発、下道走行で音楽の友ホールに15時半に到着。

ぷちぷち梱包をはがして置いてきました。頑張れよ!

都内を運転中、信号停止中にスカイツリーをパシャリ。雨雲がかかっている。

休みを取ったのは、あえて公にするような話でもないですが、本日、サラリーマンに戻ってから1年がかりのmc8社清算を結了しました。 これでもう、未練を持っても元に戻ることもできなくなり、退路を断った形で気持ちを新たにサラリーマン頑張ります。
先日、出張の合間に自宅に戻ったときに、久しぶりにエア録音をやってみました。
8.5cmのフルレンジらしい音質でしょうか。高域のちょっとした荒れや、低域は伸びていますがスパイラルダブルバスレフの緩さ、中低域の薄さはそのまま録れていると思いますが、音のフレッシュさは得難いものがあります。
https://youtu.be/FGtxHNq8L7M
オーディオシステム
- Player:Raspberry Pi 3 Model B (RS版) + Volumio2.599
- DAC:(Mshow Hifi Store) ES9038PRO USB DAC Amanero Combo384
OP AMP換装 OPA627AU/OPA827AID - PreAmp:自作不平衡/平衡JFET(元設計:ペるけ氏)改
アッテネータは使わず、DACのデジタルボリウムがかなり優秀で劣化を
感じないため、そちらで絞っています。 - PowerAmp:(hypex) UcD32MP
- スピーカー:(自作塩ビ管スピーカー) トルネードフライ (ダブルバスレフスパイラル)
- ユニット:Fostex FE88-Sol
- 録音:
- マイク:WM-61A 3端子改造+ファンタム電源対応 Shinさん改造版(fet2)コピー版
FETは、2SK2880Dで代替 - サウンドインターフェース:Steinberg UR22mkII
- フォーマット:48kbps、24bit
- マイク:WM-61A 3端子改造+ファンタム電源対応 Shinさん改造版(fet2)コピー版
3D-スパイラルのtakenakaさんのページが更新され、「ダブルバスレフ・ブースター」と銘打った、角型スパイラル・ダブルバスレフ が発表されています。
丁度、「集まれ!塩ビSPの会」 の関西での合宿オフで、「ダブルバスレフ・ホーン」で盛り上がる直前、そして、私がstereo誌コンテストに向けて躍起になっている頃、 takenakaさんの読者のお一人が、「ダブルバスレフ・ホーン」にトライされ、好結果を得られていたのです。
以前より構想はありましたが、どんな動作になるかわからなかったし、第1ダクトが効く領域では2回の位相反転を経てディップになりそうな気がして手付かずでおりましたが、やってくれる方がおられましたねえ! 感激です。
次回作は、これに一ひねりしたものを考えます。 そう、あの「うどん?スープ研究所」の七休さんの考案された「高速ダブルバスレフ」の考え方を融合して、理想的な低域特性を得ることが狙いです。
# subakoの音質を超える「速くて軽くて深い低音」をもつスピーカーを、1年後には作れそうな予感がしてきました。
先日、機械屋脱却宣言をしたところだが、早速 近所の工場から電話が入り、緊急対応を要請された。
以前、前職場で作った仮想モードのソフトを、今回Qmotionへ置き換える仕事で、うまく行かないので来てほしいとのこと。 さて、どうなることか。
***
詳しい状況は書けないが、大きなメカが大きく振動して床が揺れていた。
1年も実践から離れていたのでmotionの勘を取り戻すのに時間がかかったが、共有メモリの設定ミスと、演算周期の設定の問題で、位置指令抜けが発生しているのが原因であった。
現場では散々悩んでいたようだが、嘘のようにスムーズに動くようになって感激された。
「仮想モードを安易に考えてはいけません。悩む前に私に相談してください」 (もちろん真意は、最初から私に発注してください、ということ。) と言っておいた。 
久しぶりに自分の庭に戻ってきたような感じで、とても楽しく仕事ができた。 この続きは、また来週に続行。 やっぱりこれでなくっちゃ。
買いました。ハイエンドクラスのD級パワーアンプモジュール、Hypex NCore NC400 x2台とデュアル電源 SMPS1200A400、Dual connectionキット。 マレーシア製ですね。
| 数量 | 品名 | VAT | Total | |
| 2 | NC400 (H01U001376) | 0% | € 550,00 | |
| 1 | SMPS1200A400 (H02U004319) | 0% | € 180,00 | |
| 1 | SMPS1200A400 onto 2x NC400 Connection kit (H08U002750) | 0% | € 30,00 | |
| . | ||||
| Subtotal excl. | € 760,00 | |||
| Shipping costs | € 60,35 | |||
| . | ||||
| Total excl. VAT | € 820,35 | |||
EURO/JPY換算レート:1 JPY=0.00795722 EURO→¥103,095円
送料込みで消費税は¥5,300円、総額¥108,395円でした。
- NC400到着したので開梱


- バラックで仮組し、システムに導入


実に細やかな音が出ます。UcD32MPも良かったですが、NCoreに比べると少し甘くゆったり目だったと気づきます。そしてバラックにも関わらず圧倒的なS/N比と空間表現のアップにより、ベールが2枚ほど取り去られた感じで、ソースの音の違いをしっかり鳴らし分けます。余計な色付けは全くありませんので、若干の味気無さも感じたりしますが。
この音が、スピーカー込みで20万円以内で出ているというのは我ながら超絶なコスパだと思います。
空気録音は後日トライして公開しますが、録音のS/NやYouTubeによる圧縮でマスクされて違いは出ないかもしれません。
(追記)空気録音してみました:杏里/砂浜[OPUS21](少し再生レベルが高すぎたかも?)
https://www.youtube.com/watch?v=vs92MGHcfA0
自作のJFETプリアンプは、UcDの時は音楽性のアップにかなり貢献していましたが、今回はそのメリットと空間表現の微妙な低下デメリットがあり悩みどころです。 早くも次のプリアンプ(というよりバッファアンプ)作ろうかと思いましたが、そもそもNC400には元からディスクリートのバッファアンプが内蔵されているようで、DACからXLRケーブルのバランス接続で直接プリアンプ無しで鳴らして音が良かったのにも納得ですね。比較の結果、プリ不使用でDACのES9038Proによる劣化の少ない電子ボリウムで絞って聞いています。
将来構成として、新日本無線から今年4月に発表された「MUSES72323」電子ボリウムICを使ったプリなど作りたいですね。 どなたか設計・公開してくれないかなあ。。
でもまずはこのNC400をきちんとアルミケースに収納することからですね。そしてこのレベルになると、RasPiの電源や構成も影響しそうなので、今後の改善のモチベーションになりそうです。
スピーカーは、次期作はユニット購入も含めなかなか意欲がわきません、アップデートの価値があるのはわかっているのですが。。


 50歳台15位/エントリー104人、満足の結果です!
50歳台15位/エントリー104人、満足の結果です!使ってみました。N700系車内の無線LANサービス
最近、モバイルポイントでの接続を使っていなかったので、SSIDの入力にまごつきましたが、とりあえず@Niftyで接続してみました。
現在、広島行きN700系の車内から書いています。
速度は、ビジネス用途なら文句なし。
携帯電話端末(AU-WIN)より速いし、何と行ってもトンネルでも途切れないのは最高です。
VPNも、自社、客先とも接続OKでした。 
忙しいビジネスマンにとっては、頼りになりますね。
