
3D-subako君ヘッド部分の見積り回答が、MAKIZOUクラフトさんからありました。 今回のような球面加工の場合は 積層と球面加工を含 めての発注を推奨するとのことでしたが、 まず頭頂部のドーナツ部品加工迄のバラ部品納入では左右1setで13,000円ナリ。 高いと思えば高いです が、加工点数が多いので仕方ないか。。 これには前面バッフルと箱部分は入っていないとのこと。
なお、加工図面としてCAD図で書き直しました。PDFで貼り付けておきます。 (注)上記見積り金額は、この図面のものではなく、前回の概算のものです。
以下、MAKIZOUさんからの回答メールです。(MAKIZOUさん掲載許可済)
***
図面のご送付有り難う御座います。
通常、職人さんが図面状の製作をおこなう場合の工法は(一点もの場合)、
ド?ナツのままを接着して、電気カンナで凹凸を削り、
サンダ?・ベルトサンダ?やグラインダ?で外部を研磨します。(速いです。)
・くびれ等の2次曲線は手作業です。
・重ねた木製品のド?ム状の内部は円筒状のままが殆どです。
内部も図面の様に角度ある場合はハンドツ?ルでの手作業で削る以外に御座いません。
(内側の円は面取程度の小さいR加工用なので図面状は難しいです。 )
大量生産の場合はNC旋盤で加工しますので、全ての図面数値がそろっていれば多少の誤差程度で製造可能と思います。(内部は難しいかもしれません。)
弊社でもド?ムや球体等の製作は、電気カンナ・グラインダ?・サンダ?・ベルトサンダ?でじっくりおこないますのでそちらをお薦めさせて頂きます。(道具がそろうと作業が速いです。)
ド?ナツを製作し、外面をRや斜面取り程度は単純におこなえますので18mmス?パ?シナアピトン合板で図面2台分13,000円程度で可能です。(面取り部の角度(45。30.)は一定となります。)
どうぞ宜しくお願い申し上げます。
***
上の文章で、球面加工込みで13,000円かと思ったら、違ったようです。 あくまで部品納入まで。
さて、発注するとしましょう。
 2
2
2月末は会社の決算月です。
今のうちに今年度の収支を予測して、節税対策を考えておかないといけません。
定番としては、例えば、事務用品を予め買っておくとか、本年3月末日までに限定した「小額償却資産の10万円→30万円の拡大」措置を利用してパソコンや周辺機器などの更新とかですね。
きたいですね。
タイトルにもあるような経理・簿記上の言葉には、本当に惑わされどおしです。 慣れの問題なのですが、零細企業で会計事務所に依頼するほどの節税効果は期待できないので自分でやっているため、仕方ないですね。
で、例えば、「買掛金」と「未払金」の違い。 これは簡単です。 同じ「掛取引」の買い物でも、主たる商品などの仕入れに関わるものは「買掛金」、それ以外の買い物や経費は「未払金」で処理します。
参考: 簿記の資格をとろう!!
ここ数日間は、この辺の知識をWEBを活用して勉強しながら、「会計王」と格闘の予定です。 まあ、折角ですからストレス溜めないように、楽しんで行
一昨年の秋に続いて、今年はGWに行ってきました。筑波山。 
")
今回は出発が遅れて朝の8時。
ちょっとやばいかなあ、、と思いつつ、つつじヶ丘の駐車場に向かう。 スタッドレスから夏タイヤに戻したLAFESTAで快調なドライブで、10時過ぎには目的地付近。
つつじが丘駐車場まで800mのところで渋滞。全然動かず。
すぐにUターンして、筑波神社側に向かう。 こちらもやはり満車のオンパレード。 「駄目か・・このまま帰るのは寂しいなあ」と思って少し下り始めたところで、無料の市営第一駐車場が目に入る。 「これ、なんとなく停められそうじゃないか?」
市営第一駐車場結局、ちょっと歩くけどこの市営第一駐車場に停めました。 入ってみればやはり満車だったが、粘って待っていると出庫する車があって無事に停められた、ラッキー。
筑波山神社まで徒歩10分くらい。神社境内からケーブルカー乗り場までの階段は、案外しんどかった。 ママは子供たちに手をひかれ・・ 乗り場の「宮脇駅」で、おきまりの1枚。
宮脇駅ケーブルカーのふもと駅、宮脇駅
")
")
GW中は普段の20分間隔から増便し、10分間隔で運転している。 大人往復1020円、小学生往復510円。 山頂までおよそ8分。途中、すれ違いが1回あって、その脇の「御幸ヶ原コース」を上る人が手を振る。
山頂駅に付いた。 元々、つつじヶ丘から女体山頂まで歩いて上るつもりだったので、ここで男体山頂の周囲を歩く「自然研究路」に。 勾配路もそこそこあって、丁度良い運動になりました。
自然研究路自然研究路では、木々の緑、様々な草花が見られます。
途中、斜面一面に「ニリンソウ」が広がる場所があって、思わず撮影。
")
")
お腹がこなれたところで、広場の小石の上にシートを広げて、ランチタイム。 こういう時のお弁当のおにぎりは、格別です。
そのまま、ケーブルカーで下山し、一旦車に戻って引き返す。 そうです、温泉に浸かるんです。
ホテル青木屋で、日帰り湯山を降りて、汗を流すためにここの日帰り湯に入りました。
今回は、青木屋におじゃましました。 浴場は7Fにあるので、展望風呂・露天風呂とも景色はばっちり。 けれども殿方の展望風呂と露天風呂が繋がっていないのと、露天風呂の洗い場が2人しか使えないので、ゆっくり入っていられなかったのは残念。
前回の江戸屋は景色は今ひとつだったけれども、その点では良かったかな。
定番のカニピラフ、やはりおいしかった。
青木屋でゆっくりしたあとは、夕食にはちょっと早かったので、つくば学園都市内をちょっくらドライブ。 その後、お目当ての「メヒコ(MEXICO)つくばフラミンゴ館」へ行きました。
定番の、カニピラフ
")
私と家内は、それぞれオージーフィレステーキと、黒毛和牛ハンバーグをいただきました。 子供たちは普通のハンバーグ。
")
")
うーん、お腹一杯。 GWのたった1日のドライブだもの、少しは贅沢してもいいやね。 
帰り道も道はすいていて快適ドライブ。 1時間40分で香取市の自宅まで帰着しました。
そのうちまた行こう。 今度は体力を付けて、もう少し早く出発しなくちゃ。
先日モチーフを考えたスピーカーの設計を、ようやく開始しました。大体固まってきたかな。
逆ダブルバスレフ・スパイラル。
逆ダブルバスレフとは、第1ダクトの共振周波数のほうを第2ダクトのそれよりも低くすることで、中低域の中抜け感の少ないダブルバスレフ方式です。
まあ、見方によっては第2空気室は単なるホールディングチャンバーとしての役割しか無いかもしれませんが、第1ダクトとしてスパイラルを使うと中高域の漏れがかなり目立つので、それを抑制する効果は期待できるのです。
胴体部分の板材は、t15mmのシナベニヤ。
第2空気室は上下逆に取り付けることも可能な設計とし、コンテスト終了後もフレキシブルなテスト用スピーカーとして使えることを一つのポイントとしています。
スパイラルは、最近お気に入りの積層方式にしておいて、長さと断面積を調整可能にします。材質は、2x4材のt19mm x w140mm単板。これをくりぬいて、M6寸切りボルト1本で中央を締め上げて一体化します。
ヘッドも最近お気に入りのシナアピトン合板2枚合わせと、VP125塩ビ管の組み合わせで、ヘッド交換を容易にしています。以前作ったKidsのヘッドとの換装も可能。
名称はどうしようかな。。 形状からいけば「さくら」「星」「もみじ」 あたりになってくるのですが、、
ということで、ぼちぼち製作にかかるとしますか。 
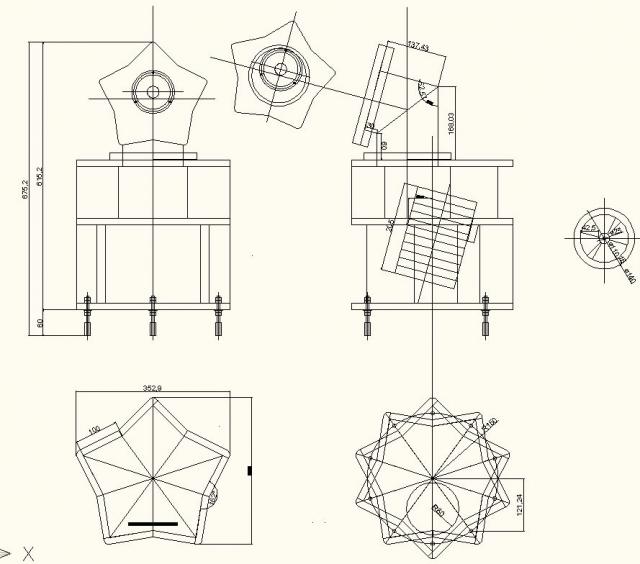
現状の設計図面
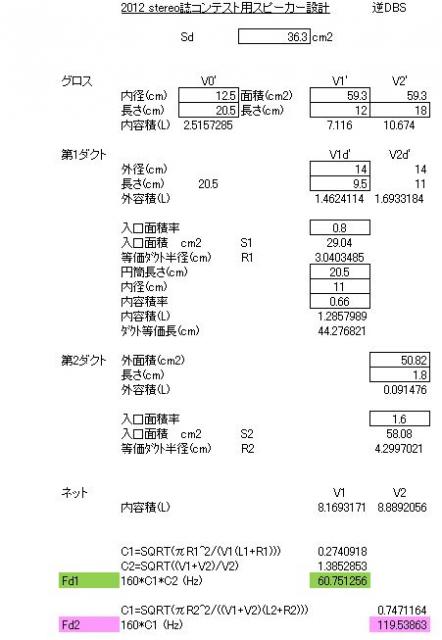
逆DBでの設計案
今日は、我が家の愛犬「りおん」と、妻・次男・私の1匹+3人で、稲毛で行われたチャーリーママさん主催のお散歩トレーニングに参加してきました。いやあ、普段は散歩嫌いなりおんが楽しそうでとても良かった。
うちの「りおん」は、内弁慶で家の中ではがうがう犬だけど、外に出ると臆病で他のわんちゃんとのコミュニケーションができず逃げてしまうし、散歩も嫌い。 そんなりおんを少しでも散歩が好きにならないかということで参加しました。

朝の9時に稲毛海浜公園の駐車場に集合。総勢10匹以上のわんちゃんが集合。 皆さんは何度目かの参加の様子、うちは初参加なので少し不安な時間でした。
(集合時間待ち、少し不安そう→)

公園内の芝生広場まで散歩。
(え、なになに、歩くのー? →)

歩きながらも少しずつ慣れてゆき、広場で自己紹介のあと、お散歩のときのリードの持ち方や、マグネット遊び(おやつを手に持ってくっついて歩く)、相互コミュニケーションの時間を過ごして。
(自己紹介。ちょっと歩いただけだけど、もう疲れたよん。→)
続いて海岸に出て一回りして、帰ってきました。


(う、海だあー!しっぽぶるんぶるん)(海って涼しいね、大好きになったよ)
3時間、こんなに長時間外にいたことなかったねえ。 歩いた距離も長かったけど、海は気に入ったようだし、他のわんちゃんと一緒だと自然に歩けるようで、とても充実した時間を過ごせました。
チャーリーママさんほか、参加された皆さんありがとうございました!。 次回の9月はランチも参加したいな。
先日、同ECMカプセルでマイクを作ったのですが、FETが小型タイプではなく、私の技量ではコネクタのインナーを使用できるサイズに収まらなかったこと、シールドケーブルが今一つでノイズが乗ること、などから、もう1セット作り直してみました。
FETは現行代替品、(イサハヤ電子)2SK2880(D)を使用です。 1個80円しますが、この小型サイズは現行品ではこれしかないし、絶版品はもうほとんど手に入りません。
シールドケーブルも、指定品の(mogami)3031をネットで購入し片側12mずつ使用。
回路は、20Ωの抵抗を省略したこちらの記事のものです。
先日の録音は、ユニットがFE103-solでハイ上りでしたが、今日はP1000に変更しています。 ハイ上りの音ばかり聞いていると、耳のバランスがおかしくなってしまい、正しい音を判断できなくなってしまいます。 P1000+ND25FA-4の組み合わせは解像度などは価格なりですが、落ち着いた音で長時間聞いていられます。
マイクが変わったこともありますが、無指向性マイクなので実際の音もこんな感じですね。部屋の特性も含めて聞いた音にかなり近い音で集音できています。 ヘッドホンで聴いてみてください。
https://www.youtube.com/watch?feature=player_embedded&v=hKeNuglNkco

実装面1
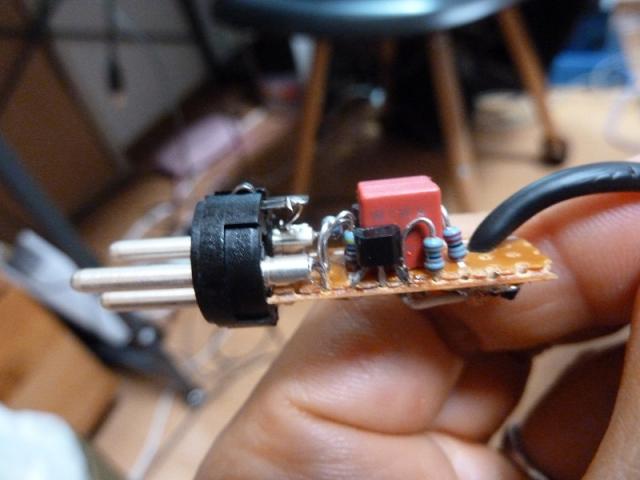
実装面2
先日、機械屋脱却宣言をしたところだが、早速 近所の工場から電話が入り、緊急対応を要請された。
以前、前職場で作った仮想モードのソフトを、今回Qmotionへ置き換える仕事で、うまく行かないので来てほしいとのこと。 さて、どうなることか。
***
詳しい状況は書けないが、大きなメカが大きく振動して床が揺れていた。
1年も実践から離れていたのでmotionの勘を取り戻すのに時間がかかったが、共有メモリの設定ミスと、演算周期の設定の問題で、位置指令抜けが発生しているのが原因であった。
現場では散々悩んでいたようだが、嘘のようにスムーズに動くようになって感激された。
「仮想モードを安易に考えてはいけません。悩む前に私に相談してください」 (もちろん真意は、最初から私に発注してください、ということ。) と言っておいた。 
久しぶりに自分の庭に戻ってきたような感じで、とても楽しく仕事ができた。 この続きは、また来週に続行。 やっぱりこれでなくっちゃ。
いつも自社のITばかり紹介していてはブログの意味が無いので、たまには本業の話題を。
(右の写真の右側です)
")
|
三菱電機の AJ65BT-G4-S3 (通称:G4-S3) を買いました。 CCリンク経由でリンク内PLCのモニタ/書き込みを行うためです。
ずいぶん昔からG4ユニットはありましたが、Aシーケンサ限定のものでした。 2000年にQモードに対応した後継機種G4-S3が発売になりましたが、あまり使う機会はありませんでした。
今回は、古い機械でAnAシーケンサで制御している装置の一部をQモーションに置き換えるもので、全体制御は今までどおりAnAで行うものです。
当時のネットワークはMelsecnet2でしたから、Qシーケンサは割り込めません。 かといって、このためだけにNet10にするのも勿体無い。 → 必然的に、CCリンク(トランジェント通信を使用:下記注2参照)を採用となりました。
また、新規制御盤と既存制御盤が離れているため遠隔読み出しできないと不便なのですが、生憎AシリーズのCCリンクではCPU経由での読み書きは出来ません。 G4-S3ユニットをCCリンクに割り込ませておけば、AシーケンサもQシーケンサも読み書きできます。(注3)
下の画像はGX-Developerの接続先指定のスクリーンショット。
")
|
AnAシーケンサでは通信速度が通常のCPU接続では9.6Kbpsですが、G4-S3を経由すると38.4Kbpsになります。 今となっては38.4Kbpsでも遅いのですが、9.6Kbpsはめちゃくちゃ遅いので この速度アップはばかになりません。 Qシーケンサ相手なら、115Kbpsで通信できます。
現場の効率アップを考慮すると今回の案件だけでも十分ですが、1つ持っていれば今後も有益か(?) とも考えて購入に踏み切りました。
今月一杯はソフトデバグやら盤メーカー・機械メーカー立会いなどの出張で手一杯の予定。 現地が終わったら、このG4-S3は外して持って帰ります。(笑)
** 注意
注1: G4-S3を使用して、古い大型AシリーズのPLCを読み書きする場合は、CCリンクマスタ/ローカルユニット(AJ65BT11)の機能バージョンB以降、ソフトウエアバージョンJ以降が必要です。
資料: PDFファイル
注2: AnAシーケンサへのトランジェント通信は、デバイス直接指定はできません。 ランダムアクセスバッファメモリ経由となります。
注3: 実はまだ通信できていなかったりします。 構成に無理があるのか、三菱電機へ問い合わせをしてみます。
→ 061126追記: AnAのユニットが古かったようでして、00年の別のユニットに交換したら通信できました。 これで38.4Kbpsで通信できます。(嬉)




