
昨日、塩ビ管SPの会から呼びかけがありまして、「 ハイエンド自作スピーカー」サイトオーナーのkenbeさん宅にお邪魔して参りました。 朝5時半に出て、帰宅は深夜2時でした。
参加者は、たてちゅうさん、長野さん、コニさん、FBさん、KO球さん、そして私です。 各人1?2作品を持ち寄って、 RC(鉄筋コンクリート)3階建てのkanbeさんオーディオルーム+高級機材で鳴らしていただきました。
部屋のあちこちに石や短冊板の反射板が置いてあって、デッドになりすぎない適度な響きが音楽を楽しく聴ける、とても素敵なオーディオルームでした。
")
|
3D-subakoをセッティング中の私。こうして見ると、ちょっと太ったかナ。 ・・それに、subako君が意外と小さいことがわかります。
皆さんの作品の 写真と 印象は、 今後集まってくるだろう塩ビ管SPの会のサイトを参考にしていただくとして、 私の3D-subakoはRC作りの部屋だと低域は量感は出てベースが弾む 感じは皆さんから好評でしたが、低域のピークが目立ってしまいました。 RC作りはシビアに出るんですね。 恐るべし。
kanbeさんの20cm2発スーパーウーハー付きスピーカーで聞く和太鼓の太い低音には、皆さんボディーブローのように内臓に効いてノックダウン です(当然ですね)。 でも負け惜しみになりますが私はもう少し軽くてすっきりした超低音を目指したいと思います。(そんな低音、経験したこともありませ んしできるかどうかもわかりませんが。。)
何はともあれ、参考にさせていただけることが盛りだくさんで、しばらくはお金をあまりかけずに、楽しみながらコツコツ改善してゆきたいと思います。
大変貴重な時間と場を提供いただいたkanbeさん、企画いただいたたてちゅうさん、参加された皆様、どうもありがとうございました。
 11
11工場設備のソフト製作には様々な課題があるけれど、技術論や精神論を超えたところに「まず動くようにすること」の重要性がある。
久しぶりに、simulatorと向き合って仕事をすることになっているので、今日はこの話題にお付き合いください。
simulationを行うことは、実際の立ち上げ業務を速やかに行うために今や非常にウエイトが高いといえる。 5年前にシーケンサのシミュレータ という記事を書いたときにはまだまだ認識が低い人も多かったが、最近では「少なくともシーケンスとタッチパネル間のバグアウトくらいはsimulationかけておいてね」が常識になりつつある。
一昔前になるが、豊田スタジアム のソフト作成・現場仕様変更には、物を動かすまでテストができない状況もあり、simulatorが大変強力な武器であった。 ただ、この時の方式はsimulatorそのものをVisualBasicで作ったので、応用性とか 他のメンバーによる改造には不向きなシステムだった。。
現在携わっているのは、ブラックボックス化された古い制御装置のレトロフィット(置き換え)の案件。 この場合、「今まで動いていた装置」であり、置き換え後に許される立ち上げ時間は短く、そしてバグによって機械を壊すことは即生産阻害に繋がる。
まさにsimulatorに期待される場面なのだが、今回はできるだけ簡便に、且つ改造が容易な方法でやってみた。
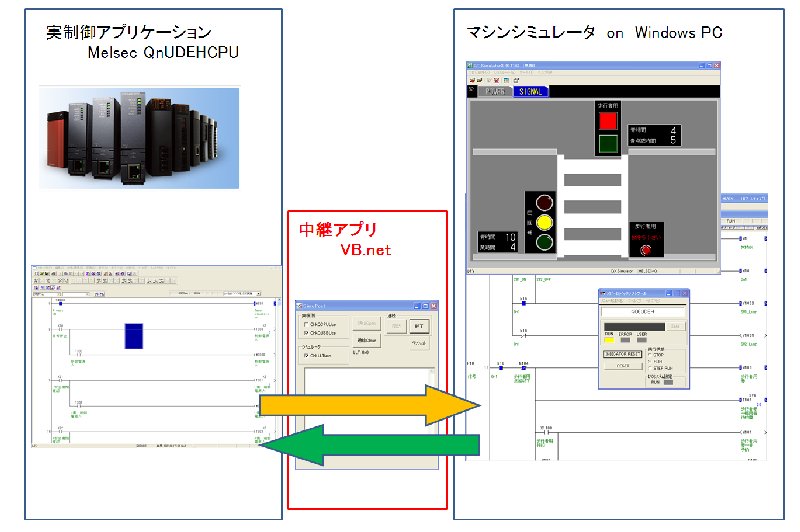 画像のように、制御装置のシーケンサと通信するポスト通信アプリケーションをVB.netで作ってPC上で動かす。一方で同PC内で実体の無いsimulator側シーケンスをGX-simulator上で稼働させ、電磁弁・シリンダモデルや、サーボ位置モデルを動かして、結果をポスト通信アプリ経由で実シーケンサに返すもの。
画像のように、制御装置のシーケンサと通信するポスト通信アプリケーションをVB.netで作ってPC上で動かす。一方で同PC内で実体の無いsimulator側シーケンスをGX-simulator上で稼働させ、電磁弁・シリンダモデルや、サーボ位置モデルを動かして、結果をポスト通信アプリ経由で実シーケンサに返すもの。
このようにしておけばsimulator自身はシーケンスで書けるので誰でもメンテできるし、実ソフトとsimulatorは完全分離できるため転用性も向上する。

USBディスプレイアダプタを購入し、3画面体制
ということで、9月に制御盤出荷予定の案件で、これを十分に活用してソフト製作に取り組んでいる。 simulatorソフト製作は案外面倒で、バグアウトが目的なのかsimulator製作が目的なのか、わからなくなることもあるのだが、今回の方法が今後のsimulation環境へプラスになることを期待している。
# 自分の仕事の歩みは、simulatorとの付き合い方の変遷という部分も大いにある、と思うこの頃。
今日は、年に2回開催のソフトテニスの杉並大会(クラブ戦)に大学のOBとして参加してきた。
ここ2か月の減量も成功し、止まっていた足の動きが復活。 ボレーの成功率が下がってきたのが少々不安材料であったが、足でカバーできるさ、くらいの気持ちでいた。 髪も染めて(笑)若い気持ちで臨んだが。。
パートナーは現役で一番ストローク力のある後衛と組ませていただき、2試合に出場。1試合目は相手のレベルが高すぎて完敗。2試合目は勝てる相手・勝てる試合であったのだが、後衛の頑張りだけでは接戦を制せなかった。
ボレーの成功率は、2割程度であっただろう。 触ってもミスか、落とすだけしかできずに決まらずグシャグシャになって結局相手のポイントに。 触ったボールの半分でも決めていたら、すんなり勝てていたはずだ。
今回の自身のプレーを冷静に評価してみる。
- 足の動きに頼る気持ちが強すぎ、ここ数年減っていた余分な動きが復活。 自制できずに要らんところでサイドやミドルを抜かれ、後衛の守備範囲を広げてしまった。
- 減量のトレーニングで体が軽くなり、動きが早くなったぶん、相手がボールを打つ瞬間に眼がブレて軌道の認識が遅れ、ラケットにきちんと捉えられないことが多かった。
- 減量で足腰は強化された反面、上半身の筋力が下がってしまい、あれほど軽量なラケットなのに思い通りに扱えなくなってしまった。
- 成年・シニアの試合に慣れてしまって、速いボールに対応できない体になりつつある。。
- 入れるだけの1stサーブはやはり辛い。2試合でダブルフォルトが無かったのが唯一の救い。
まことに不甲斐ない出来で、パートナーにも応援している皆さんにも申し訳なかった。
今後は、上半身の筋力維持にも努めてみようと思う。動体視力の維持も重要。 べち君に今日も助言いただいたテニススタイルの変更は尤もではあるのだが、(今更ということもあって)なかなか難しい。 (身長の無い前衛ゆえ、ポジションを取るだけでは相手にプレッシャーを掛けられないという宿命も大きい。)
なお、自分も含め他の皆さんの試合、それぞれに楽しんでできのではないかと思う。 毎度この場を提供してくれる幹事さん、ありがとう。
本日、所用で会社を休んで、そのついでにコンテスト用スピーカー「トルネードフライ」を音楽の友ホールに配達してきました。
宅急便で送ればよいのになぜそうしたかというと、スピーカーを寝かせた状態で振動を与えると、第二ダクトのスパイラル部分が抜けてゆく気がしていたからです。 自分で運搬すれば、配達先で確認し万一抜けていたら差し込むことができます。
コンテスト視聴会終了後の返送は、ダクトが抜けても気にする必要が無いので、プチプチぐるぐるで構わないと伝えました。
午後一に香取市を出発、下道走行で音楽の友ホールに15時半に到着。

ぷちぷち梱包をはがして置いてきました。頑張れよ!

都内を運転中、信号停止中にスカイツリーをパシャリ。雨雲がかかっている。

休みを取ったのは、あえて公にするような話でもないですが、本日、サラリーマンに戻ってから1年がかりのmc8社清算を結了しました。 これでもう、未練を持っても元に戻ることもできなくなり、退路を断った形で気持ちを新たにサラリーマン頑張ります。
さてさて、ようやく重い腰を上げて 測定機材の準備を始めました。
本日部品手配を開始したところでして、マイクは長納期で全て揃うのは1ヶ月ほど先になりそうです。
1、マイク:
その1 スピーカー測定に定番になってきた
Behlinger ECM8000 : SoundHouseで¥6,800円(税込)
その2 簡易測定用。コンデンサ型でファンタム電源不要式
ELECOM MS-STM55 : ネットで約¥900円
2、サウンドカード
現行使用中のノートPC内臓はサウンドのF特が悪く、LINE入力
も無いのでサウンドカードを新たに物色。
上記Behringerマイクはマイクプリを通してLINE入力に。ELECOM
マイクは直接マイク端子に入れる。
汎用性を考えてノートPCでも使えるように、USBタイプを選んだ。
ノートPCなら屋外での(無響室互換として)測定にもフットワーク
が良い。また、あまり中途半端な仕様のものだとマイク端子
だけでLINE入力がなかったりしたので、割と大きな出費となって
しまった。
Soundblaster Live! 24bit External : ネットで約¥8,000円
3、マイクプリ(ファンタム電源付き)
オヤさんのブログをそのまま参考にして自作することにした。
何しろ普段仕事で圧着工具を手にして制御盤内結線の手直しなど
をすることはあっても、電子工作は苦手で(25年ぶり?)、 回路の
意味を理解することから始めたので、千石電商のネット通販での
部品手配もままならない。
迷ったのがOPアンプ。 「何でも大丈夫」かと思ったのだが、一応
動作的に互換であって、更に録音に使うかもしれないことを考え
て音質の良いものに。
・ OPアンプ TI NE5532P : ¥210円
・ アルミケース タカチ電機工業 MB?3 : ¥600円
・ 抵抗その他、基板、XLRメスジャック、ピンジャック、006P電池
スナップなど・・・通販だと最低ロットが10個だったりして、意外
に高くついた。 総額¥4,000円くらい。
・ マイクケーブル
XLRオス?メスバランス、5m :YAMAHA YBC05 : ¥2,050円
と、結構な出費ですが折角の趣味なので本格的 + 電子工作の
事始め的に楽しもうと思っています、ハイ。
将来的には、球AMP自作も視野に。(笑)
「蘇我ミクス(ソフトテニス)クラブ」 ホームページを作成中です。
ドメインを取って、いつものXOOPSで。
PCから
http://www.sogamics.com/
(PCのページにQRコードも表示あります。)
")
私の思い
1、ミクスの戦績などをアーカイブして掲載しておきたい。
公開ページとしておけば、活動を広く知ってもらえる。
→ (ブログ形式が適当)
2、戦術や練習方法などの話し合いの場も欲しい。
→ (ツリー表示ができる掲示板形式が適当)
3、メンバー限定ページ内で内緒の話もしたい。
→ (掲示板、ぶろぐ、Pukiwikiなどを使って色々できる)
4、携帯からも出来るだけ使いたい
5、けれども、やっぱり気軽で楽しくできるmixiのコミュがメイン。
今回はmixiの外部サイトという位置づけ。 どのような使い方が考えられるのか、楽しみなところです。
目新しいところでは、
- WhatsNewモジュール で、新着情報を一括表示
- Xmobileモジュール で、モバイル対応可能なモジュールを使った
というところ。
どちらも、「帯に短し」なところがあるのですが、それでも便利なことに変わりありません。 多数のモジュールに対応させ る独自モジュール・・ 調査/設計/コーディング/デバグにどれだけの時間がかかることか・・ これをオープンソースで作られている皆さんに、この場を借 りて感謝の気持ちを。 ありがとうございます。
しまったぁぁぁぁぁ!
赤字だと思っていたのですが、会計上は損金経理でやっているので表面的に赤。 ところが法人税法上は、昨年分の法人税も本年の中間納税分も損金不算入。 
ということで、税法上はめでたく利益が出て、今期も法人税・県民税・事業税・市民税を、そこそこ支払う事に。 
基本的なことなんだけどねえ。頭ではわかってても、実際の数字を見るだけでは気づかなかった。
先日、出張の合間に自宅に戻ったときに、久しぶりにエア録音をやってみました。
8.5cmのフルレンジらしい音質でしょうか。高域のちょっとした荒れや、低域は伸びていますがスパイラルダブルバスレフの緩さ、中低域の薄さはそのまま録れていると思いますが、音のフレッシュさは得難いものがあります。
https://youtu.be/FGtxHNq8L7M
オーディオシステム
- Player:Raspberry Pi 3 Model B (RS版) + Volumio2.599
- DAC:(Mshow Hifi Store) ES9038PRO USB DAC Amanero Combo384
OP AMP換装 OPA627AU/OPA827AID - PreAmp:自作不平衡/平衡JFET(元設計:ペるけ氏)改
アッテネータは使わず、DACのデジタルボリウムがかなり優秀で劣化を
感じないため、そちらで絞っています。 - PowerAmp:(hypex) UcD32MP
- スピーカー:(自作塩ビ管スピーカー) トルネードフライ (ダブルバスレフスパイラル)
- ユニット:Fostex FE88-Sol
- 録音:
- マイク:WM-61A 3端子改造+ファンタム電源対応 Shinさん改造版(fet2)コピー版
FETは、2SK2880Dで代替 - サウンドインターフェース:Steinberg UR22mkII
- フォーマット:48kbps、24bit
- マイク:WM-61A 3端子改造+ファンタム電源対応 Shinさん改造版(fet2)コピー版
3D-スパイラルのtakenakaさんのページが更新され、「ダブルバスレフ・ブースター」と銘打った、角型スパイラル・ダブルバスレフ が発表されています。
丁度、「集まれ!塩ビSPの会」 の関西での合宿オフで、「ダブルバスレフ・ホーン」で盛り上がる直前、そして、私がstereo誌コンテストに向けて躍起になっている頃、 takenakaさんの読者のお一人が、「ダブルバスレフ・ホーン」にトライされ、好結果を得られていたのです。
以前より構想はありましたが、どんな動作になるかわからなかったし、第1ダクトが効く領域では2回の位相反転を経てディップになりそうな気がして手付かずでおりましたが、やってくれる方がおられましたねえ! 感激です。
次回作は、これに一ひねりしたものを考えます。 そう、あの「うどん?スープ研究所」の七休さんの考案された「高速ダブルバスレフ」の考え方を融合して、理想的な低域特性を得ることが狙いです。
# subakoの音質を超える「速くて軽くて深い低音」をもつスピーカーを、1年後には作れそうな予感がしてきました。




