日記一覧
当サイトに登録されている日記一覧



仕事で使う、カラープリンタを更新しました。
今まで使っていたのは、もう8年ほど前に購入した、EPSONのPM-800C。その当時は写真の印刷品質の良さに驚いたものでしたが、今となってはカスレが解消されなかったり、色がおかしかったり。
今日K'sデンキで買ってきたのは、同じくEPSONのEP-901F、ファックス機能付きのモデルです。
本当は、CANON製にしようかと思っていたのですが、リビングに置けば家内も簡単にデジカメダイレクトプリントができることから、現在使用中のFAXの更新をも狙っての選択です。

印刷品質は、まだ微調整していませんが、そこそこかな。 スキャナー機能がCCDセンサーではなくCISセンサーなので、撮像部にきっちり着けないとピントがボケますが、まあオマケ機能なので十分。 もちろんFAXもカラーFAXとして使えます。
そして、ADF(自動原稿送り)もついているし、写真のようにトレイが2段でA4用紙とL版写真用紙を常時トレイにセットしておけるのが、前面操作だけで済むしほこりをかぶったりもしないので吉。
左に見えるのが、現在使用中のBrother製のFAX。 3年間しか使用していませんが、コードレス機能がアナログなので音が悪い。
置き換え予定で検討中なのが、ユニデンのUCT002。 親機もコードレスで選ぶと、意外に機種が少なく、あっても安価なものが少ない。 このユニデンのものは、北米市場で育った製品のため操作性に若干の慣れが必要なようだが、安価でデザインもまあまあ。 文字が小さいのがちょっと気になるが。
まあ、電話のほうは慌てて買わずにプリンタのFAX機能を評価して十分使えると確認できてからにしておこう。
 5
5先月、FOSTEXより発表された、限定頒布の新ユニット、FE103En-Sを予約しました。
(FOSTEXサイト)FE103En-S (PDF:リリースノート)
") |
外見はFE88ES-R系だけれどエッジがコルゲーションタイプ。 スペックを見ると、Q0が0.2とすごく低いのでバックロードホーンでないと低音が出ないと思いますが、 一方で高域は10KHz以上を少し抑えてあって、ツイーターは繋げやすそうです。
まずは、自宅で休眠中のSuper-SWANに付けて聴いてみたいですね。
(追記):関連記事
なーお'nぶろぐ - [Audio] FE103En-Sが来た!
なお、他の限定ユニットとの比較など、以下のサイトがとても参考になります。
参考:(わんわんらっぱー)10cm径限定フルレンジユニットFostex FE103En-Sが発売決定



5月11日に迫ってきた、集まれ!塩ビ管スピーカーの2014関東オフ会に鳴らすスピーカー。 昨年の「スター」のユニットを交換して行く予定で、図面の変更を実施中。 
原作は、ユニットをバッフル中央から上側にオフセットしてバッフルステップ効果の低減を狙っていたのだけれど、どうも振動が大きくなる原因かもしないので、今回は中央に配置。
バッフルステップは強めに出てしまうけれども、それも音の味となればよいでしょう。
製作は18mmシナアピトン合板のバッフル板だけなので、始めれば早いと思われます。
しかし、肝心のFostexの限定ユニットFE103Solはいつ出荷開始するんだろう? 4月中旬ということだったのだが、全く音沙汰ない。。 
なお、図面は「DraftSight」というフリーのAutoCadLTほぼ互換の2次元CADを使っています。 この程度の作図ならこれで十分!
先週フロント/リアパネルに穴あけをしてきたアンプのケースに、部品を組み付ける作業を昨日実行しまして。 今日は早速コニさん宅で古舘さんと3人でミニオフ。
たてちゅうさんほかもお誘いしましたが直前でしたので先約有り、また次の機会に。
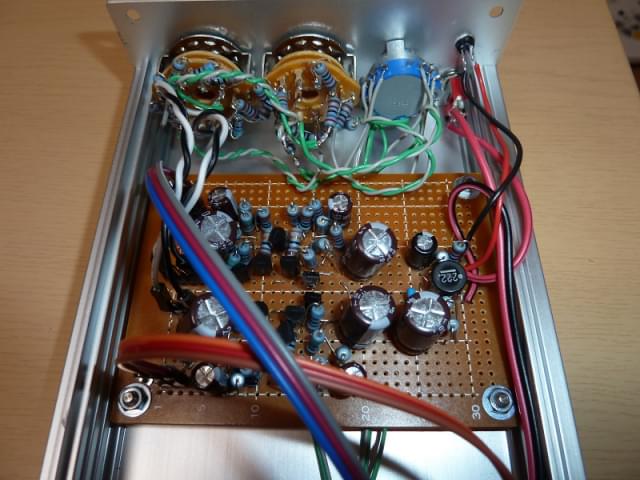
- 自作プリアンプの内部概観


- 自作プリアンプのフロント/リヤパネル裏側。フロントは2連式アッテネーターに、2入力セレクタでぎっしり。リヤもRCAとXLRコネクタで一杯。



- パワーアンプhypex UcD32MP をプリアンプと同じケースに収めたけど、内寸高がピッタリ過ぎて天板にアンプモジュールがキスします。 仕方ないので天板裏側に梱包テープ貼り。




- 完成型のフロント部/リヤ部。 2連式アッテネーターのツマミはもっと大きなものに交換予定。XLRケーブルはカナレのケーブルを使って最短長を狙って自作。




- 今日は朝移動で、コニさん宅にアンプとTornadeflyを持ち込んで、ミニオフ。 行は東名経由でスイスイ。 帰りも藤沢バイパスが混んだ以外はスムーズでした。
am11時頃から出来立てのアンプとTornadeflyをセッティング。

なんとなく、箱に収める前より音の鮮度が落ちた気がする。 ごとうさんお勧めの細いすずメッキスダレケーブルを多用しすぎたかな? 皆さんのご感想は如何に。
- コニさんの最近のお気に入りの、自作平面スピーカーユニット。 Yoshii9系の音場型スピーカーともまた違う不思議な感覚で、楽器の音像がスピーカーの後ろに出現する。一度ハマルと癖になりそう。 時期バージョンではツイーターもグレードアップするようなので期待大です。


あっという間の週末でした。コニさん、古舘さんありがとうございました。リフレッシュできました。明日からも頑張ろう!
1/26に館山若潮マラソンフルを走ってから2週間。
この時期特有の?荒川の強風と戦ってきました!

館山ではズームフライSPファストを履きましたが、僕にはクッションが足りないように感じたので、今回はエピックリアクトフライニットを引っ張り出してきて履いてみました。
まず結果だけいえばグロス3:32:00。自身セカンドベストが出ました!
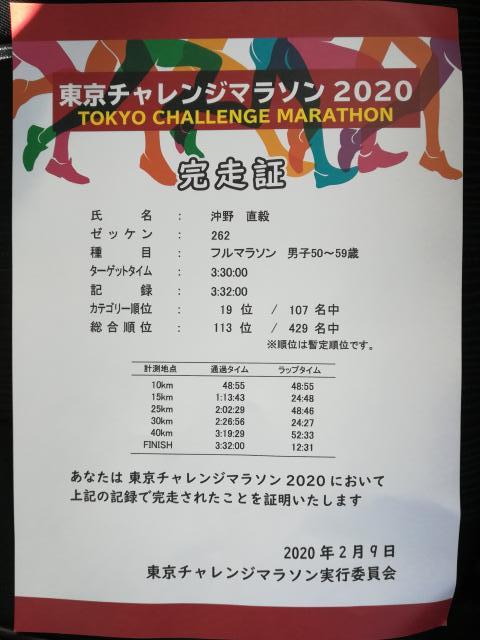
- GPSログ
Garmin
序盤から3,5ペーサー集団にピッタリ着いて行ったけど、荒川名物強風で向かい風区間の余裕を取るために追い風区間でペースがキロ4:40~45と速くてしんどかった。結局、32キロでコムレケア投入して、足つりは回避できたけど、38キロで脚が売り切れてついていけなくなりペースダウン。Neo逆ローリング走法で、トコトコ走ってどうにかゴール。フルのセカンドベストだからまあまあかな。
1月5日に走ったハーフの時とほぼ同じペースで倍の距離を走ったわけです。我ながらよく頑張ったと。
3月の板橋CITYマラソンで強風になったときと、その2週間後の佐倉マラソンに向けての良い実力試しになりました。
23日(金)は、大学のOB会に出席。
朝6時のバスで出発し、電車を乗り継ぎ南大沢まで3時間。 午前中の練習、午後の個人戦(ベチさん、ご尽力ありがとう、ペア組んでくれたKさんも。)と楽しませていただきました。 十分に腰痛になりました。(笑)
場所を飲み屋に移して、 5時半からの0次会?1次会と参加して、終バスに間に合うように途中退席で帰ってきました。
24日(土)は、千葉の横芝で行われた、鈴木杯・ふれあい杯 に出場。 今回は、牧師っちさんとペアを組んで成年の部(35歳以上)に。 時にダブル前衛になったりして、楽しいゲームでした。 スマッシュミスが多かったけど。。
おかげさまで、1勝1敗で3位決定戦にて勝利し、商品(レトルトカレー7食分)をいただきました。 打ち上げ会には出ずに帰宅し、早速これで晩ご飯。 (笑)
その他の結果は、→ ここに。
2日間まるまる外に出て帰ったら、しっかり風邪を引いてしまいました。 熱はないけど諸症状が辛い。。
自作スピーカーの音を録音して、「こんな音になりました」とYoutubeに上げても、耳で聞く音と録った音の違いが大きくて、実際の音は想像力を働かせて頭で聴くしかなかったのが今まで。
半年ほど前にe-bayで買っておいた往年の絶版Panasonic製無指向性マイクカプセル「WM-61A」を使って、shinさん設計のファンタム電源駆動型プロ用マイクを自作し、使用開始しました。
噂通りに、良い音がします。 これで言い訳は部屋ネタくらいしかできなくなりますね。。
マイク用
抵抗は本当に小さなものが良くて、「小型1/4W」と指定して買わないと、とてもじゃないけど実装に苦労しそうです。
| 品名 | 型式 | 単価(円、税抜) | 数量 |
| マイクカプセル | (Panasonic)WM-61A | 400 | 2個 |
| 基板 | 1.2mm厚 | 60 | 2枚 |
| XLRコネクター | (ノイトリック)NC3-MXX | 400 | 2個 |
| 2芯シールドケーブル | (モガミ)3031 2.8mm/29AWG | 100 | 12m(必要に応じて) |
| MFコンデンサ | (WIMA)MKS2 0.22μF 63V | 53 | 4個 |
| FET | (Toshiba) 2SK246(GR) | 30 | 4個 |
| または(イサハヤ電子)2SK2880(D) | 80 | 4個 | |
| 小型1/4W抵抗 | (タクマンorKOA)1MΩ | 10 | 4個 |
| 47KΩ | 10 | 4個 | |
| 10KΩ | 10 | 2個 | |
| 2.2KΩ | 10 | 2個 | |
| 1.5KΩ | 10 | 2個 | |
| 20Ω | 10 | 4個 |
実際には、シールドケーブルは指定品を秋葉原で入手できず別のものを買っています。
なお、FETを2SK-2880(D)を使う場合は、こちらの記事の回路図です。
ほか、必要に応じて
| 品名 | 型式 | 単価(円、税込) | 数量 |
| オーディオインターフェース | (Steinberg)UR22mk2 | 13,589 | 1台 |
・・これは、(TASCAM)US-144mk2ではノイズレベル、ゲインとも実力不足で使用に耐えないレベルだったため追加購入したもので、もっと良質のものを持っていれば購入不要。 言うまでもなく、48Vファンタム電源を2本のマイクに供給して入力できるもの。48Vでなくてもよいが、電圧が下がればその分マイクカプセルへの印加電圧も下がってS/N比が悪化するため、48Vがベスト。 なお、UR22mk2は仕様上48Vとなっているが、実測すると38Vしかなかった。
なお、新規に購入する場合は、マイク自体のゲインがそれほど高くないため、高ゲインアンプを内蔵しているものが良い。
製作
基板製作
上記ページの回路図の通りに作る。 以上。
といっても、今回は相当小さなコネクタの中に沢山の部品を詰め込むため、画像だけ何枚か載せておきます。 なお、ノイトリックのXLRコネクタは元々内ねじで最初から内径が小さいのに更にインナー部品でケーブル口を締め付ける方式で、とてもじゃないけどこのサイズに収めることはできず、インナーは付けずに組んでいます。
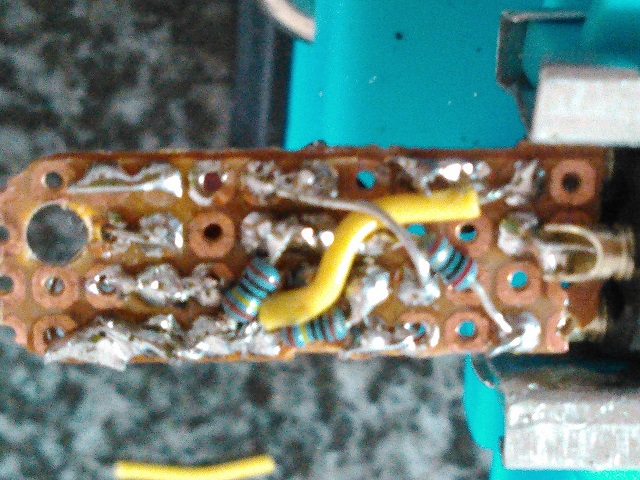
裏側、シールドケーブル結線前

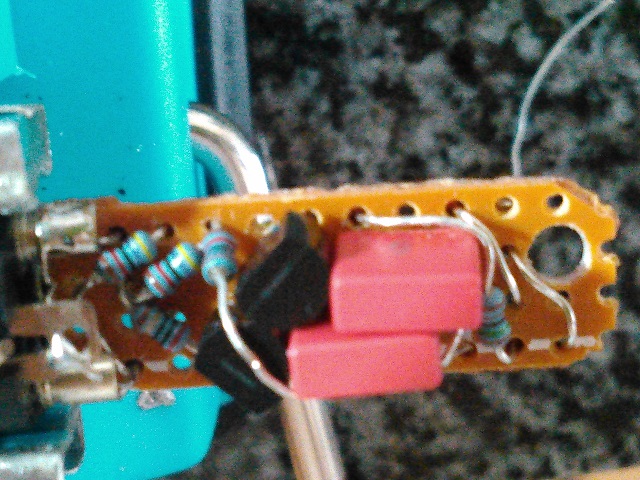
裏側、シールドケーブル結線後
上面
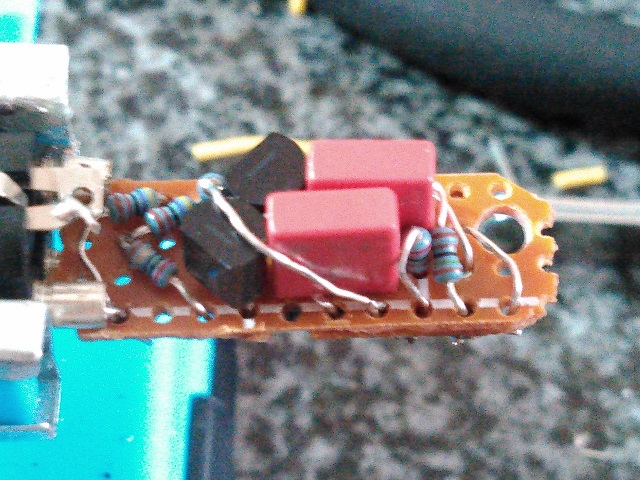
上面、別角度
マイクカプセルの3端子化
これはもう、上記shinさんのブログにも掲載されていますし、オリジナルのLinkwitz氏のところにも載っていますから、同様にやればOKです。
ただ、Grandははんだがついても本当に取れやすいので、付いたらすぐにエポキシで固めてしまいましょう。
その後、自前のケースに入れるのですが、私は手持ちであった、標準プラグの金属ケースを使いました。もっと小さいもののほうがしっくりきそうです。

安価な3脚を使用

100円ショップで買ったスチールプレートに、メガネクリップで取り付け

NAS+UR22mk2
録音、試聴
以下聞いてわかるとおり、音質の良さは本当で、e-bayでギャンブルで買ったWM-61Aが本物であると確信しました。 
低域も伸びているし、高域も強調せずすっきり伸びきっていると思います。
https://www.youtube.com/watch?v=NLDBxkJ5Wy8
Tornadefly + FE103sol で、2016年塩ビ管スピーカーオフ会で鳴らした曲をかけてみました。 プレイヤーを長年使用してきた、X-DDC+DC-61から、RasPiオーディオに変更。 録音機材もH2nから自作マイクに変更して、細かな音が拾えるようになりました。
<音源>
選曲:http://www.enbisp.com/modules/diary/index.php?page=detail&bid=536
<再生>
プレーヤー:
・RaspberryPi3 + ES9023 Hifiberry 互換DAC
・ダイソーT-362改造版電源
・アンプ: Marantz PM-14SA ver2
・スピーカー:Tornadefly(FE-103-sol) + ND25FA-4(Hipass 12db/oct)
<録音>
マイク: (Panasonic) 無指向性 WM-61A 3端子改造+ファンタム電源対応Shinさん改造版(fet2)コピー版
マイクカプセルはe-bayで購入、FETは、2SK246GRを代替で使用。
http://ameblo.jp/shin-aiai/entry-10465233115.html
サウンドインターフェース:Steinberg UR22mkII
フォーマット:48kbps、24bit
賃貸マンションで大きな音を出せず、S/Nが十分でない、生活雑音が入る、途中クリップ箇所がある、などご容赦願います。
