日記一覧
当サイトに登録されている日記一覧



さてさて、ようやく重い腰を上げて 測定機材の準備を始めました。
本日部品手配を開始したところでして、マイクは長納期で全て揃うのは1ヶ月ほど先になりそうです。
1、マイク:
その1 スピーカー測定に定番になってきた
Behlinger ECM8000 : SoundHouseで¥6,800円(税込)
その2 簡易測定用。コンデンサ型でファンタム電源不要式
ELECOM MS-STM55 : ネットで約¥900円
2、サウンドカード
現行使用中のノートPC内臓はサウンドのF特が悪く、LINE入力
も無いのでサウンドカードを新たに物色。
上記Behringerマイクはマイクプリを通してLINE入力に。ELECOM
マイクは直接マイク端子に入れる。
汎用性を考えてノートPCでも使えるように、USBタイプを選んだ。
ノートPCなら屋外での(無響室互換として)測定にもフットワーク
が良い。また、あまり中途半端な仕様のものだとマイク端子
だけでLINE入力がなかったりしたので、割と大きな出費となって
しまった。
Soundblaster Live! 24bit External : ネットで約¥8,000円
3、マイクプリ(ファンタム電源付き)
オヤさんのブログをそのまま参考にして自作することにした。
何しろ普段仕事で圧着工具を手にして制御盤内結線の手直しなど
をすることはあっても、電子工作は苦手で(25年ぶり?)、 回路の
意味を理解することから始めたので、千石電商のネット通販での
部品手配もままならない。
迷ったのがOPアンプ。 「何でも大丈夫」かと思ったのだが、一応
動作的に互換であって、更に録音に使うかもしれないことを考え
て音質の良いものに。
・ OPアンプ TI NE5532P : ¥210円
・ アルミケース タカチ電機工業 MB?3 : ¥600円
・ 抵抗その他、基板、XLRメスジャック、ピンジャック、006P電池
スナップなど・・・通販だと最低ロットが10個だったりして、意外
に高くついた。 総額¥4,000円くらい。
・ マイクケーブル
XLRオス?メスバランス、5m :YAMAHA YBC05 : ¥2,050円
と、結構な出費ですが折角の趣味なので本格的 + 電子工作の
事始め的に楽しもうと思っています、ハイ。
将来的には、球AMP自作も視野に。(笑)
 3
3高脂血症対策など健康増進で減量を開始して、1か月ほど。
そろそろ目標の「?5Kg」を達成しつつあります。
今回は、食事でご飯など炭水化物の量を減らしカロリーに気をつけることと、 膝と相談しつつジョギングの距離を延ばしたことで、かなり効果的な減量ができています。
天気の良い早朝には、10Kmのジョギング。 朝食前ですから低エネルギー状態ですので、途中の水分補給時に、ヘルシア緑茶の350mLを1本。脂肪燃焼で走るエネルギーになります。 
") |
帰宅して、仕事を始めるのですが、さすがに10Km走った後にバナナ1本と汁物だけではきつく、血糖値が下がり過ぎて頭の回転が落ちます。 
そんな時には、ヘルシアウォーター。 低血糖を脂肪燃焼で補い、頭の回転が戻ります。 今は1Lペットボトルが出ているんですね。 500mLx2本より少し安いので、1日1L消費する私としては好都合です。
これで今日も仕事が快調に進みます。 
") |
なんだか花王の宣伝マンみたいだ。。
コストパフォーマンスを考えると、カテキンのタブレットの方が良い気がしますね。。 

昨日シナアピトン合板製のバッフル板を制作し、FE88ES-Rで試したTornadeflyに、本日手元に来たFE88-Solを取り付けて、音出ししてみました。
事前に周波数特性などで予想していた通り、高域の尖がりは払拭されていますが、もう少し出てもよかったかも。 高域不足と感じる人も多そうな地味で正確な音調という印象。
低域もまあ出ますが、FE88ES-Rほど出ていない気もします。 Qts値の0.49と0.46の僅かな差によるのでしょうか。
それにしても、悪く言えば優等生的ななり方です。バックロードホーンだと高域不足を更に感じるのでは、という気もします。 ボーカルのはっとするような色気も、FE-83Solのほうが上を行っています。 でも長い時間聴き続けるには、このFE88-Solのほうが安心して聴ける気がしますし、何しろ品位が高いので、良い録音のソースで聴かないと正しい評価ができない良質の音です。
Youtubeに録音を5曲アップしました。
https://www.youtube.com/playlist?list=PLrX-IFCuRL1XWRfxFNPMnyhMcDC6fxNCh
週末、それも月に1度か2度しか自宅に戻らない出張生活の中で、楽しみは音楽ですね。 今回も空気録音をしてみました。
中学・高校の頃の曲が無性に聞きたくなる今日この頃。リンダ・ロンシュタットのベストアルバムを2枚仕入れて、懐かしの名曲を3曲空気録音しました。
Linda Ronstadt Gratest Hits vol1 & 2
やっぱりフルレンジにはボーカルですねえ。今回は録音レベルを抑え気味にしました、ロック・ポピュラーはダイナミックレンジが狭いのでこれで余裕です。
いや良いですね。特に Heat Wave のコブシの効いた「Yeay,Yeay! Yeay,Yeay!」、ビートの効いた70年代ロック最高です!
https://www.youtube.com/watch?v=Ba15TtgRFmE
再生機材評価用録音
音源:
Linda Ronstadt Greatest Hits vol.1 & 2 (asylum 1976 / 1980)(2015 Remaster)
1. Just One Look 2. Tracks of my Tears 3. Heat Wave
オーディオシステム紹介
Player:Raspberry Pi 3 Model B (RS版) + Volumio2.599
DAC:(Mshow Hifi Store) ES9038PRO USB DAC
up sampling 88.2kHz/24bit + Amanero Combo384
https://ja.aliexpress.com/item/32869612489.html
+ OP AMP換装 OPA627AU/OPA827AID
PreAmp:自作不平衡/平衡JFET(元設計:ペるけ氏)改
http://www.naaon.com/modules/plactice/index.php/content0196.html
PowerAmp:(hypex) UcD32MP
スピーカー:(自作塩ビ管スピーカー) トルネードフライ + FE88-Sol
ユニット:Fostex FE88-Sol
録音:
・マイク:WM-61A 3端子改造+ファンタム電源対応
Shinさん改造版(fet2)コピー版、FETは、2SK2880Dで代替
・サウンドインターフェース:Steinberg UR22mkII
・フォーマット:48kbps、24bit
今年はコンテスト応募を見送り、その分色々なことができており、先日注文した Fostexの限定8cmユニット、「FE83-Sol」が入荷したので、2014年stereo誌自作スピーカーコンテスト作品「クリアミント」のウーハーを外して取り付けてみました。
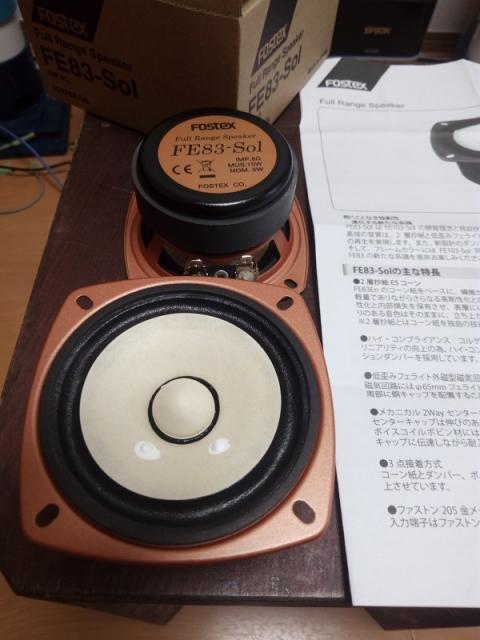
手元に届いたFE83-Sol
フレーム自体の穴径は大丈夫だったのですが、取り付けビスの位置が微妙に違っていて取りつかない・・ 仕方なく、45度回して付けました。 この向きだと内部の音抜けがイマイチなのですが仕方ありません。

クリアミントに取り付け。フルレンジで使用しツイーターはダミー。
早速視聴です。

公開されている周波数特性のとおり、FE103-Solのような高域の強い強調はありませんが、それでも中高域にエネルギーが厚めで、高域の伸びがあまり目立たないような。。 けれども耳障りではないので、長時間の視聴も耐えられます。
中域の良さは、ベースのFE83の延長線上にあり健在です。特にボーカルはいいですね。決して神経質ではなく、存在感があり大らかに聴けます。 ボーカルを聴くためだけにこのスピーカーに切り替えて聴きたくなります。
低域に関しても、決して量感豊かというわけにはいかないものの、Q0cが0.65と非常に使いやすい値であり、ボン付く感じがあればそれはエンクロージャの問題ということでしょう。 クリアミントは少しボン付き気味ですので、専用のエンクロージャを設計したいところです。
・エルガー 威風堂々 第五番
https://www.youtube.com/watch?v=ZzWS2YG4-BI
・Fourplay Gulliver
https://www.youtube.com/watch?v=v3HGlHIuxa0
・Norah Jones Don't Know Why
https://www.youtube.com/watch?v=LiQb-eigVnw
本日夕刻、お客様への申し送りをばたばたと終わらせ、ご挨拶のあと、レンタカーを博多駅前に午後8時の門限ぎりぎりで返却して一息ついているところです。 長いようであっという間だった不休の1ヶ月。 明朝、成田行きの便で千葉に帰ります。
この出張を含め本年は色々な面で昨年とは違う仕事をしており、がむしゃらにやってきた初年度とは少々違う気持ちになりつつあります。 Privateの理由から退職の道を選び 「独立」「会社設立」から1年半。 今の心境を書き記してみたいと思います。
まず、私の業務内容である「工場設備のソフト開発と立ち上げ」において、一般的には「個人」で請け負うことは全く問題ありません。 自分自身が「ガシガシ」仕事をすることに変わりはないのですから。
しかし、私は以下の理由から会社設立の道を選びました。 (振り返りも含め、徒然に)
1、お客様の信頼感
請負先が「個人」か「会社」か。 それが同じスキルの持ち主ならば、迷わず「会社」を選びますよね。 もちろん「個人」が信頼できないということではありませんし実際ほとんど変わりはないと思うのですが、 後出する本人の「気持ち」の面で差が出そうです。
また、本人を良く知っている人ならば「この人に頼んでおけば大丈夫」 とわかっている場合でも、 それが大企業の「調達部門」であればまずは疑いの目で見ることから入ります。それが彼らの仕事ですから。 そんな場合の「説明」の容易さに、「個人」と「会社」では開きがあります。
2、自身のモチベーション
一番重要と考えていたのがこれです。
自宅兼事務室でSOHO的に仕事をする身分となることから、 仕事とプライベートの区分けが「あいまい」です。 (笑) これは全くもって事実でして、1年半を経過した現在でも「あいまい」なことに変わりないです。
そんな状況の中で仕事をするには 気持ちの「前向きさ」を重視して「会社」にするほうがいいのかな。。 程度に考えていました。 でも今ではこれは「大正解」であったと考えています。
自宅で仕事をしている最中は、社ロゴ入りの「作業着」を着用しています。 田舎の自宅でワイシャツを着て作業をするのは似合いません。 やはり仕事柄、作業着がベストです。 着ていると、何となく気が引き締まるような気がします。
仕事がきつい時、「あーもう、今日はこの辺で終わりにしちまおうかな・・」 と思う時が誰でもありますが、 それに歯止めをかけるのは自分自身しか居ません。 今は小さくても、もしかしたら将来大化けするかもしれない「自分の会社の将来」を背負っていることで、気持ちの面での一つの張りになっています。
特に今回の仕事のような、めちゃくちゃな仕事環境の場合には、なおさらです。 一段落して思い返せば、キレてしまった時には単なる「一個人」でしたが、そこに至るまでの自分とその後のフォローなどは、やはり「会社の社長」としての自分がいまして、「会社にしておいて良かった」 と思うひとコマでした。
仕事を請けるときは、社長としての自分。 それを元に自分自身に指示を出し、「へーい。 わっかりやしたあ! 親方ぁー!」 (スネークマンショー風。 古っ!) となって仕事をこなします。 一種の2重人格のようですが、 夫々の立場での苦楽を味わうことができます。
3、税金に関すること
会社を立てれば、個人で全収入を得るよりも庶務を家内に(パートで任せても、そうでなくても)分割することで多少の節税になりますし、仕事でもプライベートでも共用できる備品などは、会社で購入して個人で「借用」することは、それが目に余るようでなければ一般的には問題ありません。 そのような備品(FAX複合機など)は、会社の経費なり資産なりに計上できます。 経理や決算など、最近ではネットの情報も多いので会計ソフトでなんとかなります。
以上の点は、独立前から調べていたとおりです。 道を外して税務調査で「脱税」と言われるようなことにならぬよう、健全な会社維持に努めています。
そして会社にかかる税金と、個人にかかる税金。 それらの合計が、実際に税務署や地方自治体に収める税金の額になります。 収入が増えていった時に個人でやるよりも節税になります。
・・と考えていたのですが、今年の会社法の改正に合わせてもぐり込まされた、例のとんでもない「役員報酬の損金不算入」改悪。 晴天の霹靂とはこのこと。 自分たちはお国からそんな風にしか見られていないのか、と悲しみと怒りを覚えました。 今日は詳しく書きませんが、とにかくやる気をそがれて、萎えちゃいます。。
**
以上、だらだらと書きましたが、そんな感じです。
やってみた感想。 「会社を持つのも、なかなか良いものですよ!」
使ってみました。N700系車内の無線LANサービス
最近、モバイルポイントでの接続を使っていなかったので、SSIDの入力にまごつきましたが、とりあえず@Niftyで接続してみました。
現在、広島行きN700系の車内から書いています。
速度は、ビジネス用途なら文句なし。
携帯電話端末(AU-WIN)より速いし、何と行ってもトンネルでも途切れないのは最高です。
VPNも、自社、客先とも接続OKでした。
忙しいビジネスマンにとっては、頼りになりますね。
買いました。ハイエンドクラスのD級パワーアンプモジュール、Hypex NCore NC400 x2台とデュアル電源 SMPS1200A400、Dual connectionキット。 マレーシア製ですね。
| 数量 | 品名 | VAT | Total | |
| 2 | NC400 (H01U001376) | 0% | € 550,00 | |
| 1 | SMPS1200A400 (H02U004319) | 0% | € 180,00 | |
| 1 | SMPS1200A400 onto 2x NC400 Connection kit (H08U002750) | 0% | € 30,00 | |
| . | ||||
| Subtotal excl. | € 760,00 | |||
| Shipping costs | € 60,35 | |||
| . | ||||
| Total excl. VAT | € 820,35 | |||
EURO/JPY換算レート:1 JPY=0.00795722 EURO→¥103,095円
送料込みで消費税は¥5,300円、総額¥108,395円でした。
- NC400到着したので開梱


- バラックで仮組し、システムに導入


実に細やかな音が出ます。UcD32MPも良かったですが、NCoreに比べると少し甘くゆったり目だったと気づきます。そしてバラックにも関わらず圧倒的なS/N比と空間表現のアップにより、ベールが2枚ほど取り去られた感じで、ソースの音の違いをしっかり鳴らし分けます。余計な色付けは全くありませんので、若干の味気無さも感じたりしますが。
この音が、スピーカー込みで20万円以内で出ているというのは我ながら超絶なコスパだと思います。
空気録音は後日トライして公開しますが、録音のS/NやYouTubeによる圧縮でマスクされて違いは出ないかもしれません。
(追記)空気録音してみました:杏里/砂浜[OPUS21](少し再生レベルが高すぎたかも?)
https://www.youtube.com/watch?v=vs92MGHcfA0
自作のJFETプリアンプは、UcDの時は音楽性のアップにかなり貢献していましたが、今回はそのメリットと空間表現の微妙な低下デメリットがあり悩みどころです。 早くも次のプリアンプ(というよりバッファアンプ)作ろうかと思いましたが、そもそもNC400には元からディスクリートのバッファアンプが内蔵されているようで、DACからXLRケーブルのバランス接続で直接プリアンプ無しで鳴らして音が良かったのにも納得ですね。比較の結果、プリ不使用でDACのES9038Proによる劣化の少ない電子ボリウムで絞って聞いています。
将来構成として、新日本無線から今年4月に発表された「MUSES72323」電子ボリウムICを使ったプリなど作りたいですね。 どなたか設計・公開してくれないかなあ。。
でもまずはこのNC400をきちんとアルミケースに収納することからですね。そしてこのレベルになると、RasPiの電源や構成も影響しそうなので、今後の改善のモチベーションになりそうです。
スピーカーは、次期作はユニット購入も含めなかなか意欲がわきません、アップデートの価値があるのはわかっているのですが。。
3D-スパイラルのtakenakaさんのページが更新され、「ダブルバスレフ・ブースター」と銘打った、角型スパイラル・ダブルバスレフ が発表されています。
丁度、「集まれ!塩ビSPの会」 の関西での合宿オフで、「ダブルバスレフ・ホーン」で盛り上がる直前、そして、私がstereo誌コンテストに向けて躍起になっている頃、 takenakaさんの読者のお一人が、「ダブルバスレフ・ホーン」にトライされ、好結果を得られていたのです。
以前より構想はありましたが、どんな動作になるかわからなかったし、第1ダクトが効く領域では2回の位相反転を経てディップになりそうな気がして手付かずでおりましたが、やってくれる方がおられましたねえ! 感激です。
次回作は、これに一ひねりしたものを考えます。 そう、あの「うどん?スープ研究所」の七休さんの考案された「高速ダブルバスレフ」の考え方を融合して、理想的な低域特性を得ることが狙いです。
# subakoの音質を超える「速くて軽くて深い低音」をもつスピーカーを、1年後には作れそうな予感がしてきました。
