日記一覧
当サイトに登録されている日記一覧




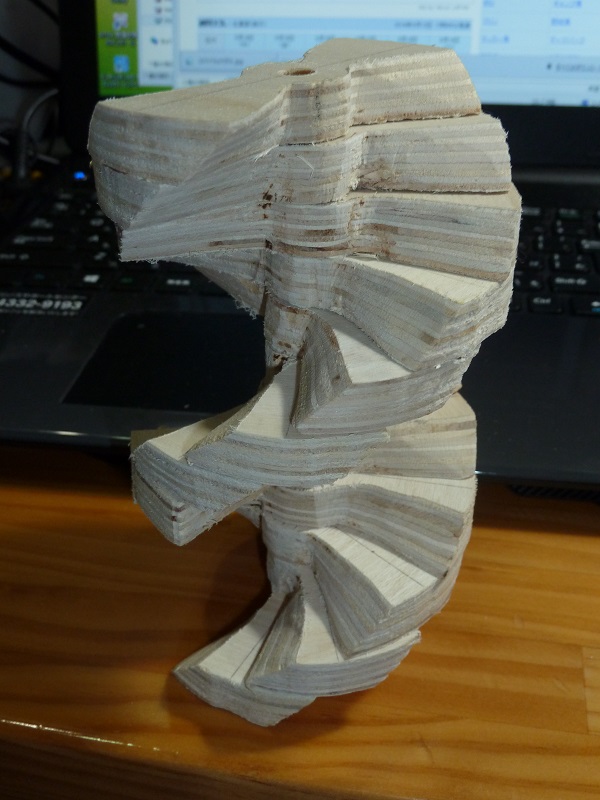
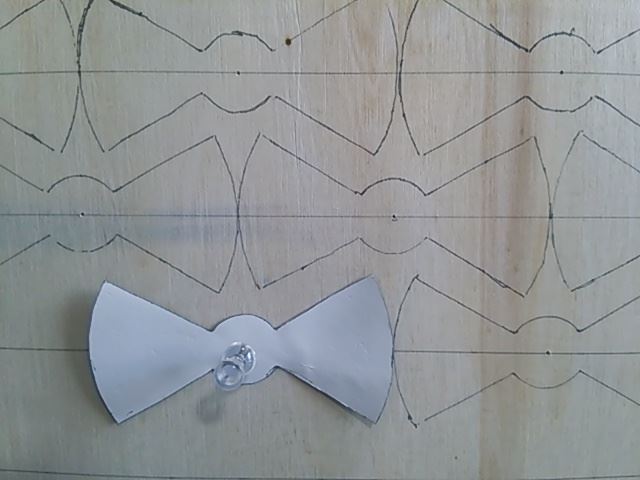
スパイラルの各ディスクを斜めカット。
M6ボルトで螺旋に締め込み、外周を削り込み、VU75パイプに「ガタガタ」に入るようにする。
ダイソーで買ったウレタンスポンジのすきまテープを螺旋外周に貼り付け、パイプに挿入。 きつくてスキマテープが剥がれてしまうようなら、削り込みが足りない。今回は2回目でOKになった。
下部ベース部分の部品切り出し完了。 125ソケット下部に穴あけ未実施。
そういえば、バッフル板も切り出したのだった。
続きは明後日。
 2
2今日は曇りで工作日和。
昼前に開始して、昼食をはさんでさきほど終了。 終わった途端に雨が降り出した。 なかなか運が良い。
まずは穴あけから。 7mm径x80個、10mm径x166個をハンドドリルで。
 |
そのあと、ハンドジグソーでひたすらカット。
 |
40枚のディスク切だしまでで終了。
 |
夕方から雨が降り出した。でも降ったりやんだりで、合間をみて面取りも実行、12枚ほどできた。
こんな感じに重ねてたあと、M6ボルトで締めあげて、周囲にスキマテープを螺旋状に貼り、VU75塩ビ管に挿入するです。
各ディスクの位相ずれ具合を調整し、ダクト開口面積を調整できます。ひねりを強くすると面積減少、弱めれば面積増大です。
 |
今年もstereo誌コンテストの時期が来ました!
既に塩ビ管スピーカーのサイトのほうに、8月号付録の2way各ユニットの測定結果を報告していて、シミュレーションは進めていました。 なんとなく良い感じの特性が出たので、あとは実際に作って煮詰めてゆけばおKでしょう。
肝心の箱のほうはなかなかアイデアが出なかったのですが、無い知恵をかき集めて、構想が出来上がってきたので一回目の案です。
画像のとおり、今回は塩ビ管スピーカーです。
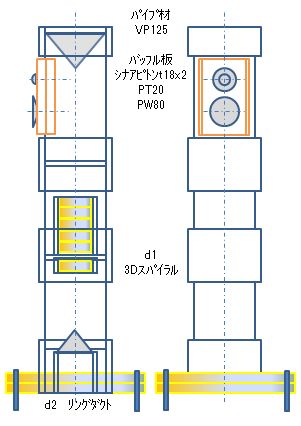 |
いつもの感じでVP125を使用。 但しバッフル面の固定方法を変更してユニットは正面を向けます。
上蓋、下蓋の三角錐は、共鳴予防のつもりです。材質などはこれから考えます。
ダブルバスレフとして、第1ダクトは3Dスパイラル、第2ダクトはリングダクト。 例によってfd1<fd2として逆ダブルバスレフ構成で考えてます。
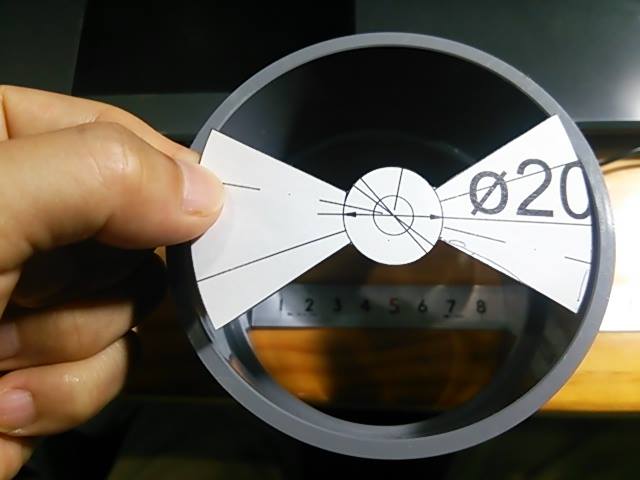
今回の3Dスパイラルダクトは、φ100mmのPVCパイプを利用して、積層タイプながら少し手抜きします。 詳細は今後の製作段階にて。
リングダクトは内リングの固定方法など課題も多く、これから考えます。
mbedで色んなことが簡単に出来るだろうことはわかったけど、遊びと勉強ばかりでは面白くないので、仕事に何か応用できないかと考えた。
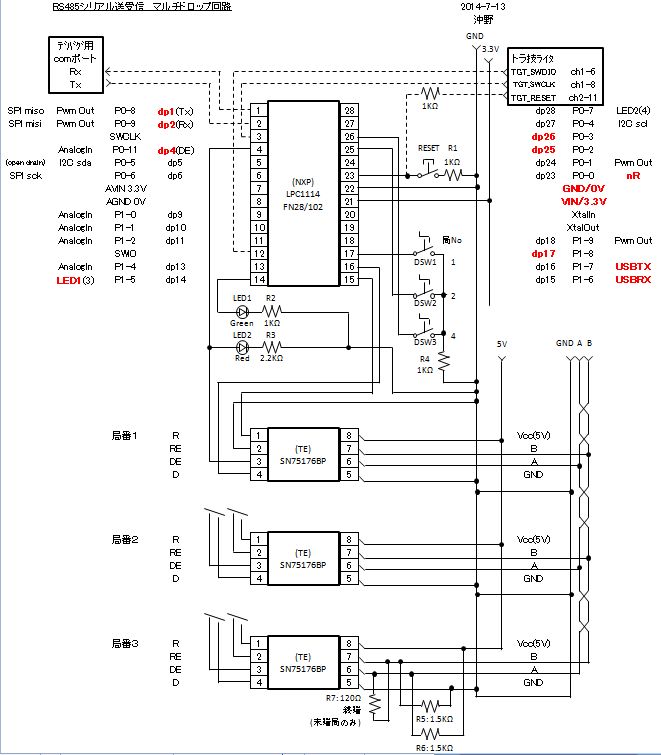
そこでこの時にVB.netで作ったRS485通信のPC内シミュレータを、mbed LPC1114に移植できれば複数台の通信確認が取れるなと考えて、RS485通信トランシーバIC (TE)SN75176BP とブレッドボードその他を購入しやってみました。 
今回は、3台分の機器側に成りすますシミュレータをブレッドボード上に配線します。 ブレッドボード上に1台ずつ、計3枚の普通のブレッドボードが必要。
- 購入部品 (LED、抵抗、配線材などは手持ち品を流用)
名称 型番 購入先 数量 単価(税抜) 普通のブレッドボード EIC-801 スイッチサイエンス 3枚 257円(税込) mbed対応マイコン LPC1114-FN28
生産中止(?)品秋月電子通商 3個 120円 RS485/RS422トランシーバIC (TE)SN75176BP 秋月電子通商 3個 80円 ディップSW 5P 秋月電子通商 3個 60円 タクトSW 各色 秋月電子通商 3個 10円
- 配線図
- 電源はトラ技ライタ経由USBから取る。
- ディップSWで局番(今回は1~3)設定可能とする。
- SN75176BPのDE端子は、機器1台なら3.3V印加しておくだけでOKだが、機器2台以上マルチドロップの場合は、マスタからのコマンドに返信するとき以外はバスを解放する必要があるため、マイコンのdp4を返信直前にHigh、返信後20msec後にLowとするソフト処理を行う。
- マイコン側は3.3Vなのでこのままで良いか不安もあったけど動いてるから大丈夫?
- マスタ側ソフトは、このディレイ時間20ms分の待ちが必要。
- この信号のHighの時に赤LEDを点灯させる。
- RS485バスラインのプルアップ抵抗(R5)、プルダウン抵抗(R6)の抵抗値は、実際の路線長で決める必要があると思うのだけど、今回はテストなので小さ目の抵抗を入れてみた。
- 生存確認用にLED1を点滅。 UARTポートと共に割り込みプログラムとする。
 |
- プログラム
- 今回は、仕事の秘匿義務の兼ね合いもあるので非公開です。すみません。
- コーディング・デバグは、ある程度の段階でmbedオンラインコンパイラからエクスポートして、μVision4にて行いました。
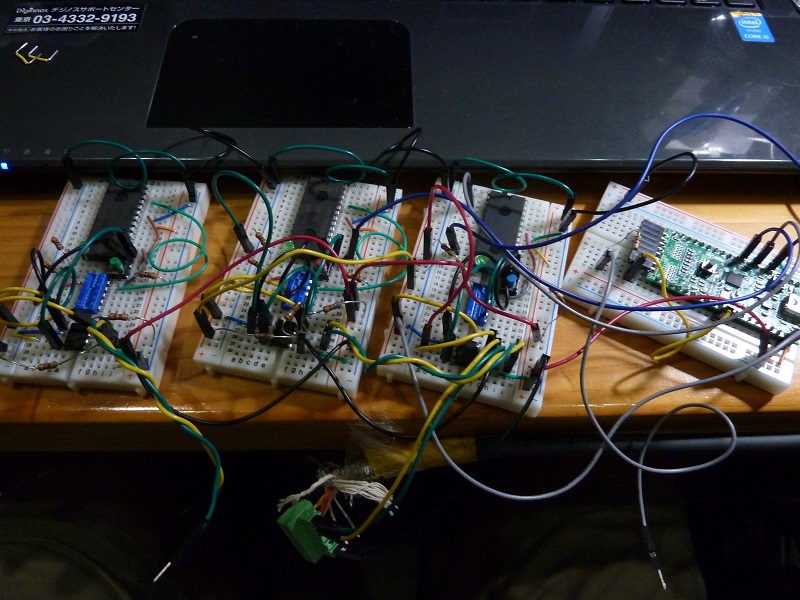
- 配線状況
テストなのでヒドイ状態ですね。(汗)下記動画の際には少しだけ整理しました。
- 動画
PLC側のテスト画面と共に映してみました。ボーレートは38,800bps。
機器1→機器2→機器3と通信先を切り替えてサイクリックに通信します。 機器側が受信し送信中に赤LEDが点灯します。 1回のコマンドで1点灯で、点滅回数分のコマンドを処理しています。
今後も仕事で通信案件が来た時には、こんな感じでシミュレータを作って事前テストするですね。 部品単価が安いので、USB/RS485コンバーターを買うよりずっと安価にできますし。 
ここまでテストばっかりやってきたけど、そろそろ実際に動かす何かを作るかなあ。。 
引き続き、mbedをいじってます。
先日入門したばかりでもとても便利と感じるmbedのオンラインコンパイラ。
オンライン上で先人の公開したライブラリやプロジェクトをさくっとインポート出来たり、自分のPC環境に依存しない、デバイス毎に異なる設定などは予め設定済みで、マイコンの種類を変えても少しの変更ですぐに移植できる、などなどとても良くできていて、私のような初級者には大変ありがたいものであります。
しかしですね、、やっぱりIDEでオフラインコンパイル、ステップ実行デバグをやりたいですね。 ということでmbedと先人の知恵を頼ってやってみました。
- 概要
トランジスタ技術2014年3月号には付録にトラ技ライタが付いてくる。 これをEIL-MDK(μVision4)でコンパイルしたバイナリをCMSIS-DAP経由でマイコンにロードするのと、デバグで使います。 UART(USBシリアル)は同時に使えなかったので(やり方がまずかった?)相変わらずFT232RLを繋げています。
もっと楽をしたい方は、素直にSwitchScienceでLPC1114のmbedボードを買ったほうが良いと思います。。たぶん。
→その後、UARTもCMSIS-DAPも同時に接続できるようになり、FT232RLは不要になりました。
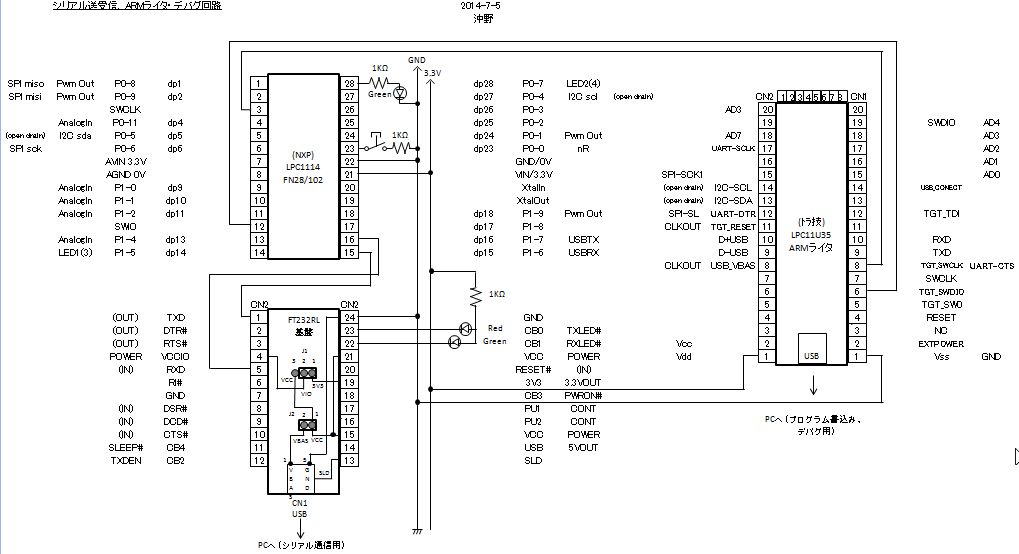
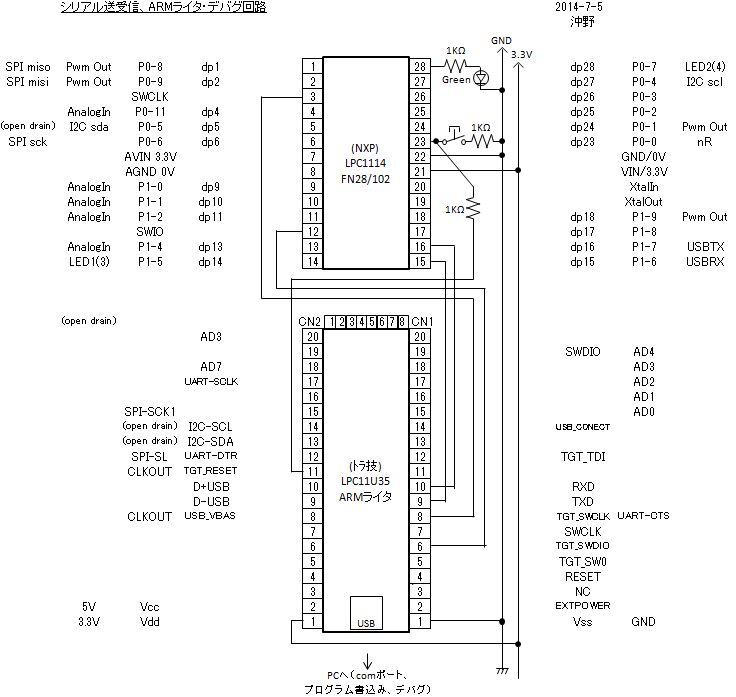
- 接続図
左図ではUART(USBシリアル)用にFT232RLを入れていますが、これは不要になり右図のようにトラ技ライタ側のUARTポートからTx,Rxに繋ぎます。FT232RLあり → なし 
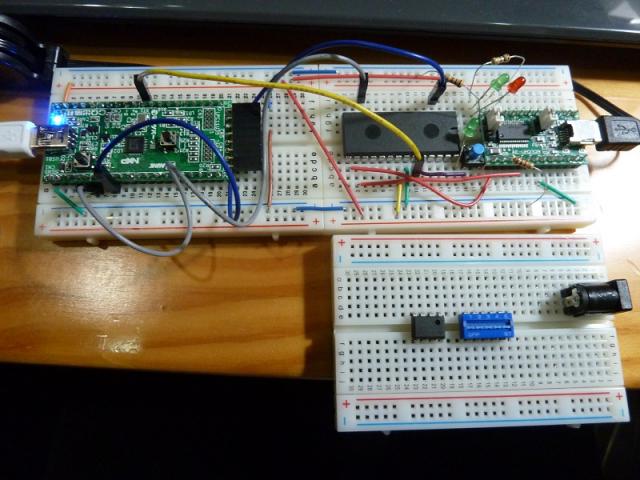
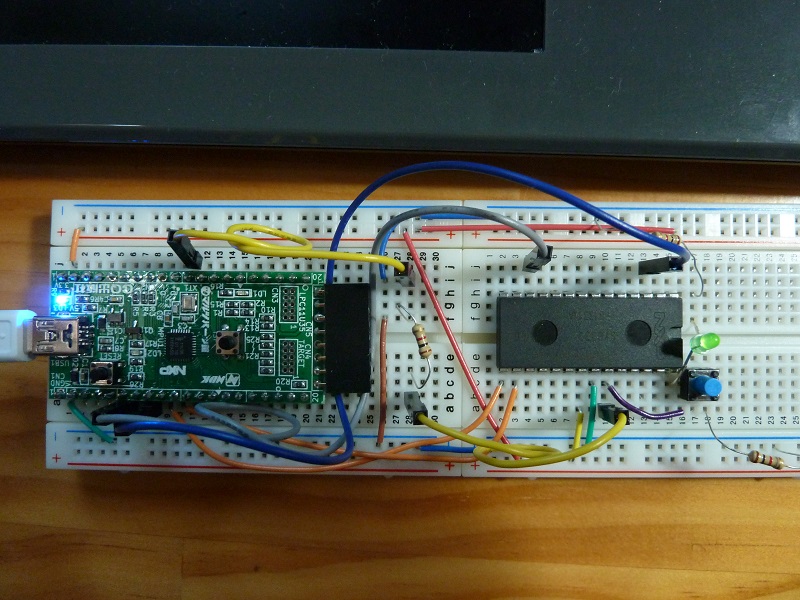
- 現物
左図のブレッドボードの上段左側がトラ技ライタ。右側がLPC1114マイコンとUSBシリアルFT232RL。 右下のは次回テスト予定のRS485ドライバチップとディップSW。 右図はFT232RL無しの最終状態。

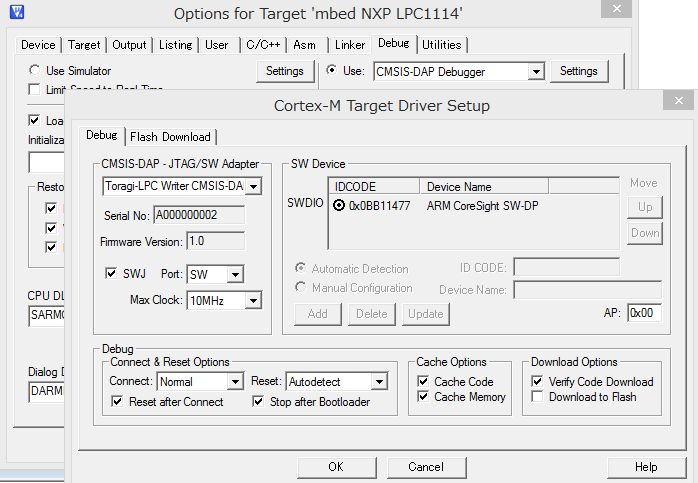
- μVision4でデバグポートにトラ技ライタを指定したところ。 速度は10MHzでも行ける。 μVision5では100KHzまでしか出なくて断念した。
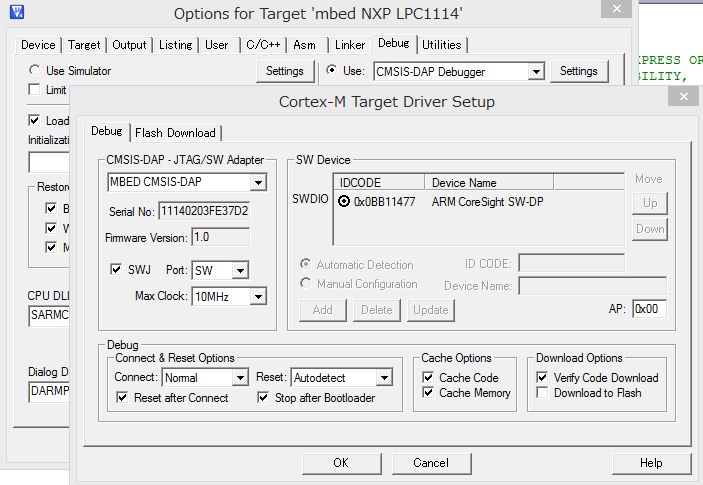
→その後、トラ技のファームウエアではなく、このページのファームウエアに書き換えた後で、トラ技ライタをUSB接続した状態でこのページのUART最新ドライバをインストールしたところ、無事に全て使えるようになりました。 μVision側設定画面はこうなりました。
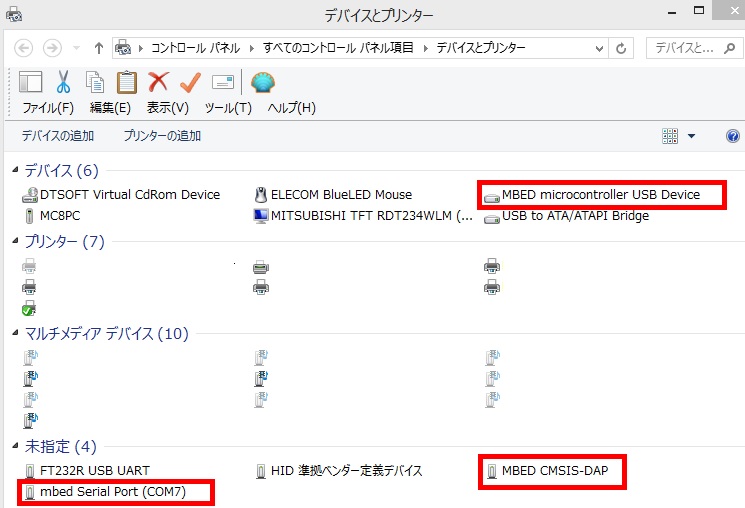
 Windows8.1上のデバイス表示に、3つの接続が出現していればOK。 1つしか出ない場合は、USBドライバがインストール出来ていないです。
Windows8.1上のデバイス表示に、3つの接続が出現していればOK。 1つしか出ない場合は、USBドライバがインストール出来ていないです。

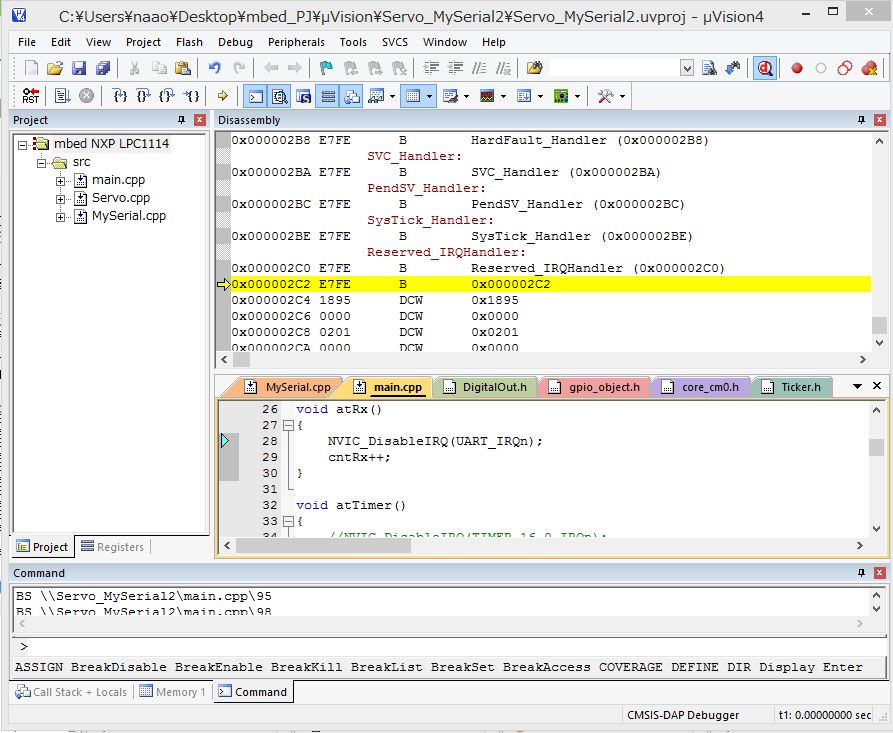
- 割り込みイベントが発生すると、デバグがここで止まってしまい再開不能でマイコンをリセットすることになる。
今のところ解決策がありません、どなたかご存じの方、Help me。
もしかするとリアルタイムOS使っていないとだめなのかな? デバグしなければきちんと動くんだけど・・
→これもトラ技のファームから変えて、さらにnRESET配線1本をきちんと結線することでOKになりました。 nRESETを結線すると、LPC1114に付けたタクトSWでリセットできなくなるので、その際には毎回ライタからのnRESET結線を外してSWを押す、という操作が必要になります。
→上のほうの接続図のようにnRESET中間に1KΩの抵抗を入れることで、そのままリセットも効くようになりました。正しい回路ではないと思いますが、実用上は今のところ問題ありません。
参考:
- トラ技ARMライタを mbed interface にする(LPC1114FN28編)
まさにこれ!と思ってここのファームウエアを試してみましたが、UART(comポート)が出てこない、CMSIS-DAPが出てこない、という状態で断念。 PCがWindows8.1だからかなあ。。
→再度試したところ、下記ページにあるUARTドライバをインストールしたら全てOKになりました。
但し上のページの結線は、何かおかしいです。nRESETの配線が別のところへ行っている気がします。- μVision4でデバッグ!(mbed-MACRUM)
トラ技ライタでは無くファームウエアはここのものは使いませんが、作業の流れはこれが近いです。ファーム書き換え後のUARTドライバはここからダウンロードしてインストールします。 - Keil MDK-ARM v4 のダウンロード
このページのv4のリンクより。 ライセンスフリー版では32Kbの制約があります。v5は通信速度が出なかったです。→これも再度確認したら問題ありませんでした。 - mbedをIDEで使う(野良2-mbed)
μVision4のあたりが詳しいです。
- μVision4でデバッグ!(mbed-MACRUM)
- トラ技のページ
ファームウエアはここから「トラ技ARMライタ基板をCMSIS-DAP(デバッガ)として使うときのファームウェア」をダウロードして流し込みます。→当初はこれでやっていましたが、後で別のファームでOKになり不使用です。- トラ技2014-3月号
ここでまだ買えます。(マルツパーツ館) - 部品セットはここで買えます。(マルツパーツ館)
- トラ技2014-3月号
次回は、この時に仕事で作ったPC上のVB.NetなRS485シミュレータを、LPC1114マイコンに置き換えて通信してみるテストです。
まずは現物から
- LPC1114FN28とFT232RL USB/serialコンバーターで、シリアル通信+サーボモーターを回してみる。
以下、準備から実際のプログラムソースまでメモっておきます。

まず頭に入れてくべきこと 
- mbedオフィシャルサイト 全てはここから始まる。
- mbedとは:Wikiedia
- mbed と Arduino の違い
準備したもの
- mbed対応のマイコン。今回は、LPC1114FN28 を、秋月電子で購入。 1個たったの120円!(税込)
- USB-シリアル変換モジュール FT232RL 秋月で購入。
- Arduinoスターターキット SGK-ARD-KIT 千石電商で購入 arduino uno 付きで4,940円。 arduino unoの他に付属のセット品が色々入っていて、初めてには良いですね。 arduinoからいじり始めてみたものの、mbedを教えていただいたら断然そちらが面白くなってます。
配線
- 参考
- mbed LPC1114でLチカしてみた(1):しなぷすのハード製作記
マイコンとFT232RLの接続が参考になります。 プログラムを書き込んだあとリセットしなくても済みます。 なお、書き込みソフトはこのページの要領ではなく、LPC1114限定で下記ページのものが使いやすいです。 - mbed LPC1114でLチカしてみた(2):しなぷすのハード製作記
LPC1114限定で「LPCISP」というソフトを公開しておられます。USB/serialコンバーター経由で一発書き込み、即座にリセットが働くので、楽ちんです。")
- mbed LPC1114でLチカしてみた(1):しなぷすのハード製作記
")
- ハード図
ブレッドボードを使うとテストは楽にできるけど、一度バラしたら再現するのが面倒になっちゃいますんで、ちゃんと図面を書くクセをつけたいですね。今回は資料への使いまわしがしやすいようにEXCELでこんな感じで書いてみました。- LPC1114のLED回路はソース出力(PNP)でプラスコモン、FT232RLのLEDモニタ回路は、シンク出力(NPN)でマイナスコモンになっているみたいで、ちょっと混乱します。
工業用制御部品に関していえば、日本国内やアジア圏ではシンク(NPN)でマイナスコモン、欧州ではソース出力(PNP)でプラスコモン が多いですが、欧州への輸出時にはCEマーク表示の関係で本質安全の考え方から必ずPNPにしないといけなくなるため、国内でもPNPへの変更が徐々に進んでいる・・ のかなあ?
組み込み部品での状況は全くわからずです。
- LPC1114のLED回路はソース出力(PNP)でプラスコモン、FT232RLのLEDモニタ回路は、シンク出力(NPN)でマイナスコモンになっているみたいで、ちょっと混乱します。
") |
 |
プログラム
mbedはarduinoと違い、ほぼ素のC/C++で書けます。 オンラインコンパイラでビルドが通ったプロジェクトをエクスポートして、外部のIDEで編集・コンパイルできることからもそれを実感できます。
とはいえまずはオンラインコンパイラで。
") |
使用ライブラリ
- Servo
mbedのオンラインコンパイラ上の「Import」でキーワード「Servo」で検索し、sford cstyles さんの mbed R/C Servo Libraryを試しに使ってみました。 - MySerial
自作ライブラリ MySerial です。mbed標準のRawSerialクラスを継承し、受信文字列のchar配列格納を簡単にできるようにしてみました。 現時点でのソースを貼っておきます。- GetString メソッドは、テンプレート化でオーバーロードしてあり、引数にポインタ変数指定でも char配列指定の参照でも使えるようにしました。
- Wait時間の設定を追加してあります。
その他APIは、こちらを参照。
- MySerial.h


1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82
- | | | | | | | | | ! - | | | | | | | | | | | | | | | | | | | | | ! - | | - | | | ! | | - | | | ! | | - | | | | ! | | - | | | | ! | - | ! | | | | | !
/** mbed Serial Library extend RawSerial * Copyright (c) 2014 Naoki Okino * * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, * FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE * AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER * LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, * OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN * THE SOFTWARE. */ #ifndef MBED_MYSERIAL_H #define MBED_MYSERIAL_H #include "mbed.h" /** MySerial control class, based on a RawSerial * * Example: * @code * #include "mbed.h" * #include "MySerial.h" * * MySerial pc(USBTX,USBRX); //instance of MySerial Class * char cWord[16]; //receive chars or cWord[256], cWord[1024] etc.. * * void readbuf() * { * // int iRtn = pc.GetString(6,&cWord); //Serial received chars by pointer cWord * int iRtn = pc.GetString(6,cWord); //Serial received chars byref of cWord * } * int main() { * pc.baud(9600); //set baud rate * pc.format(8, MySerial::None, 1);//set bits for a byte, parity bit, stop bit * pc.SetRxWait(0.01, 0.001); //set wait getting chars after interrupted, each char * pc.attach( readbuf, MySerial::RxIrq ); //Set Interrupt by Serial receive * } * @endcode */ class MySerial : public RawSerial{ public: /** constructor to get chars received by serial * * @param PinName tx * @param PinName rx */ MySerial(PinName tx, PinName rx); /** set wait getting chars after interrupted * * @param float _fRxStartWait wait getting a 1st char after interrupted * @param float _fRxEachWait wait getting each char */ void SetRxWait(float _fRxStartWait, float _fRxEachWait); /** function to get chars after received chars by serial * * @param int size for get chars * @param *cWord returns got chars by pointer * @param returns success by 0 */ virtual int GetString(int size, char *cWord); /** overload function to get chars after received chars by serial * * @param int size for get chars * @param cWord returns got chars by ref * @param returns success by 0 */ template <class X> int GetString(int size, X cWord) { return GetString(size, &cWord); } protected: float fRxStartWait; float fRxEachWait; }; /* class MySerial */ #endif
- MySerial.h
- MySerial.cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
- | | ! - | | ! - | | | | | | - - | ! | - | - ! | | ! !
#include "MySerial.h" MySerial::MySerial(PinName tx,PinName rx):RawSerial(tx,rx) //constructor { fRxStartWait = 0.01; //wait getting a 1st char after interrupted fRxEachWait = 0.001; //wait getting each char } void MySerial::SetRxWait(float _fRxStartWait, float _fRxEachWait) { fRxStartWait = _fRxStartWait; //wait getting a 1st char after interrupted fRxEachWait = _fRxEachWait; //wait getting each char } int MySerial::GetString(int size, char *cWord) //by pointer { int i=0; int ichar; memset(cWord, '\0', strlen(cWord)); //initialise chars wait(fRxStartWait); while(1) { if(!readable()) { break; } ichar = getc(); if(i<size) { cWord[i] =ichar; //putc(ichar); } i++; wait(fRxEachWait); } return 0; }
- MySerial.cpp
メイン
- シリアルコマンド
ただの実験なので、<STX><ETX>などの制御コマンドは一切無しです。(汗)- 「start」で開始
- 「pxxx」(xxxは角度)で位置決め
- 「stop」で停止
です。
- 受信の割り込みと、50ms定時タイマ割り込みを受けてメインで動作及びLチカさせてみました。
- 割り込みのIRQ変数名は、シリアルが「UART_IRQn」、定時タイマが「TIMER_16_0_IRQn」でしたので、割り込み優先度や割り込み禁止を個別に管理できます。 この辺の定義は、こちらに全部書いてありますね。
- まだ試していませんが、フロー制御を入れないと9600bps以外では取りこぼしが発生します。
- ソース
volatile のつけ方などわかっていないので、まだ適当です。- main.cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101
- | | ! - - ! ! - | | - ! | - | | - | | - | | | - | ! - | | ! ! - | | - | ! | | | | | | | | | | - | | | - | | | ! | | - | - | | ! | - ! ! !
#include "mbed.h" #include "Servo.h" #include "MySerial.h" Servo myservo(dp18); MySerial pc(USBTX,USBRX); //instance of MySerial Class Ticker timer; DigitalOut led2(LED2); //alive check LED volatile int cntRx=0; volatile int cntRx_old=0; volatile int timeUp=0; volatile int timeUp_old=0; char cWord[6]; //receive chars or cWord[256], cWord[1024] etc.. char *pCword = cWord; //pointer for cword const char ccStart[6] = "start"; const char ccStop[5] = "stop"; const char ccMove_[2] = "p"; int readSize = 5; int doStatus; int iDeg; void atRx() { NVIC_DisableIRQ(UART_IRQn); cntRx++; } void atTimer() { //NVIC_DisableIRQ(TIMER_16_0_IRQn); timeUp++; } void readbuf() { pCword = cWord; //pointer for cword //int iRtn = pc.GetString( readSize, &cWord[0] ); //Serial received chars by pointer of cWord int iRtn = pc.GetString( readSize, cWord ); //Serial received chars byref of cWord if(strcmp(cWord, ccStart)==0) { // start doStatus=1; printf("started\n"); } else if(strcmp(cWord, ccStop)==0) { // stop doStatus=0; printf("stopped\n"); } else if(cWord[0]==ccMove_[0]) { // 1st char matches pCword++; // increment pointer to get after 2nd chars iDeg = atoi( pCword ); printf("%d\n",iDeg); } else { //no action except for start/stop printf(" no match %s\n" , cWord); } if ((doStatus == 1) && (0 <= iDeg) && (iDeg <= 180)) { wait(0.01); // waits for the servo to get there myservo.position(iDeg - 83.0); } } int main() { pc.baud(9600); //set baud rate pc.format(8, MySerial::Odd, 1);//set bits for a byte, parity bit, stop bit //pc.format(8, MySerial::None, 1);//set bits for a byte, parity bit, stop bit //pc.set_flow_control(MySerial::RTSCTS,dp26,dp25); pc.SetRxWait(0.01, 0.001); //set wait getting chars after interrupted, each char wait(0.25); //startup wait pc.attach( &atRx, MySerial::RxIrq ); //Set Interrupt by Serial receive NVIC_SetPriority(UART_IRQn, 120); timer.attach( &atTimer, 0.05 ); NVIC_SetPriority(TIMER_16_0_IRQn, 10); myservo.calibrate(/* range */ 0.00099, /* angle +/- */ 90.0); while(1) { wait(0.01); if(cntRx != cntRx_old) { readbuf(); cntRx_old = cntRx; NVIC_EnableIRQ(UART_IRQn); } if(timeUp != timeUp_old) { if( 10 <= timeUp ) { led2 = !led2; timeUp=0; } timeUp_old = timeUp; //NVIC_EnableIRQ(TIMER_16_0_IRQn); } } }
- main.cpp
")
タグ PC ハード

メインノートパソコンを更新しました!!
今まではレッツノートを借用させていただいてましたが、自分で買うにはまずは安くないと無理。
総額税込10万円未満、これ大事な要件ですね。 がたいがデカイのはガマンガマン。。
ってことで、ドスパラのCritea DX4 のwindows8.1のカスタム、8GB,COREi5-4210M 2.6GHz 。
LCDは1366x768 なのだが遠視にはこのほうが吉。自宅では外付けディスプレイ使うしね。
早速、手持ちの1GB 7200rpmのHGST製ハードディスクに換装。
ホントはSSDにしたいけど、痛い目にあったばかりだから当分はこれで我慢します。
...
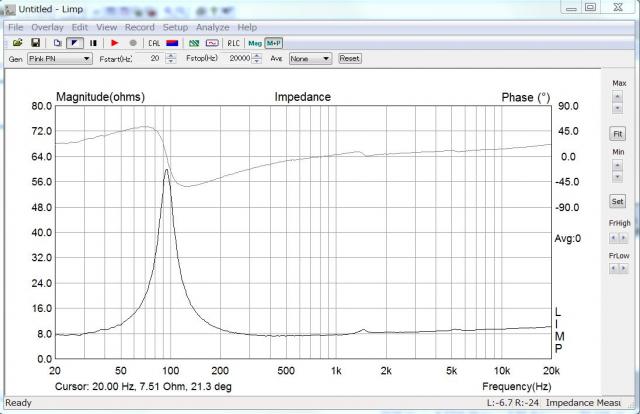
先日のインピーダンス測定後、ダクトの再チューニングを行い、周波数特性と合わせて確定版として再測定しました。
ついでに、先日のインピーダンス特性がグラフ縦軸がLOGスケールではなくリニアスケールになっていたのに気づいたのでそれも修正。
また、周波数特性もARTAのデュアルチャンネルで測定し、Speaker Workshop にインポート、インピーダンス特性グラフと並べてみました。
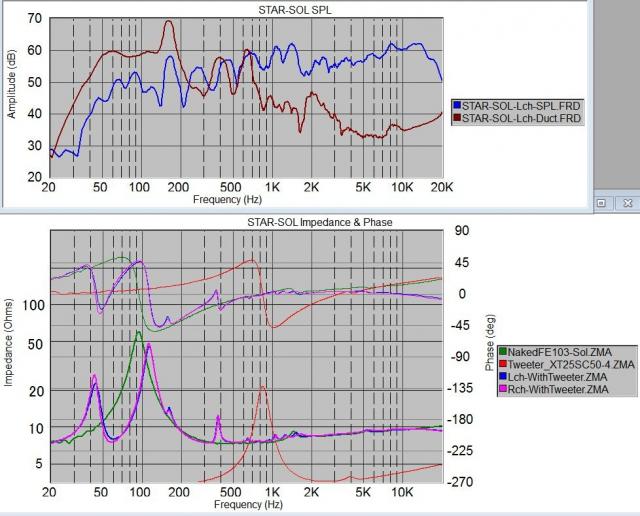 |
中域の共鳴があり、ダクトからの漏れによってモロに干渉をうけていますね。何とも荒々しい特性です。(汗) オフ会は吸音材の増量もせずにこのまま行きます。
オフ会の配布資料を書きました。
昨日F特測定したのですが、どうもRchの低域の伸びが今一つのようで、7年ぶりにインピーダンス測定にトライしてみました。
使用ソフトは、「ARTA」に付属の「LIMP」です。 「Myspeaker」でもインピーダンス測定は可能なのですが、アンプを介して行うため、バランス出力のアンプは使えなかったり、接触不良などで抵抗が外れたりするとPCのマイク入力が壊れたりするので、アンプを介さずに測定できる「LIMP」で今までも測定してきました。
- 参考にしたのは、当サイトのこちらの記事。 オヤさんのサイトがずいぶん前にクローズされてしまったのは痛かったですが、今なら他にも参考にできそうなサイトはググれば出てきますね。
- ARTAは、こちらからダウンロードできます。
- ケーブルの製作
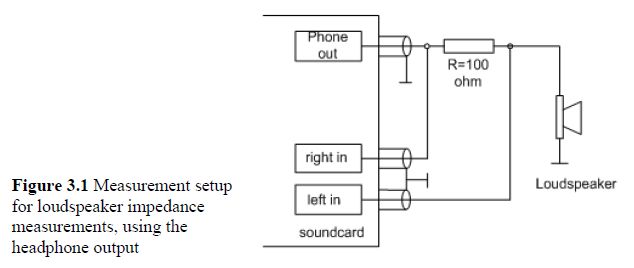
- サウンドデバイス出力を100Ωセメント抵抗を介してスピーカーに接続し、抵抗手前からダイレクトにマイクRch入力に。 抵抗のスピーカー側からマイクLchに入力します。
LIMPマニュアルの「Figure 3.1」 
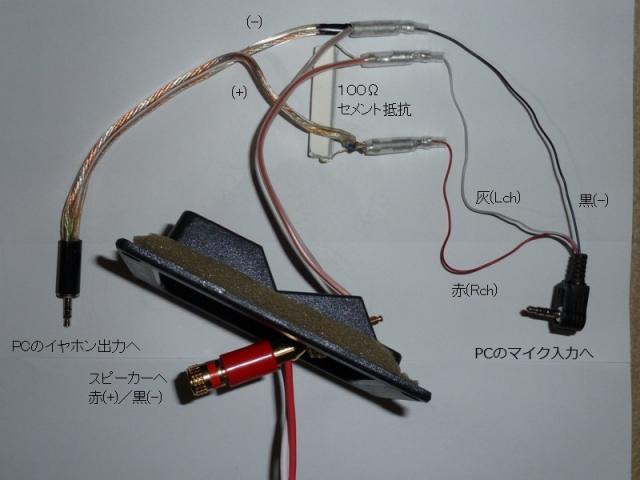
- 実際に製作したケーブル。 (手持ちにあったものを流用したので、配線太さがまちまちですが)
イヤホン出力プラグ側はモノラルでもOKですが、マイク入力プラグはステレオミニプラグが必要です。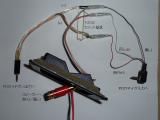
- サウンドデバイス出力を100Ωセメント抵抗を介してスピーカーに接続し、抵抗手前からダイレクトにマイクRch入力に。 抵抗のスピーカー側からマイクLchに入力します。
- LIMPの設定
- Setup / Audio Devices
製作したケーブルをイヤホン出力ジャック/マイク入力ジャックに差して、LIMPのメニューのSetup / Audio Devices で表示するウインドウ上で、使用するサウンドデバイスを選択します。
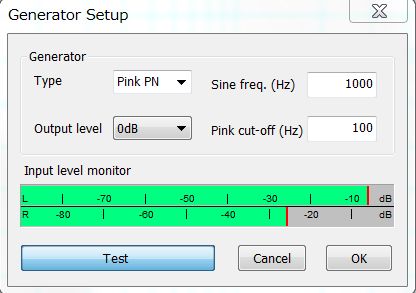
- Setup / Generator
スピーカーを接続し、LIMPのメニューのSetup / Generator で表示するウインドウ上で、「Test」を押すと、マイク入力レベルが表示されます。 出力レベル十分に高くしておくと、測定精度も高くなるそうです。
なお、この図のようにL側のレベルが高い場合は、L/Rが逆に接続されている可能性があります。 (その場合は、次の項目「Refference channel」を変更します。)
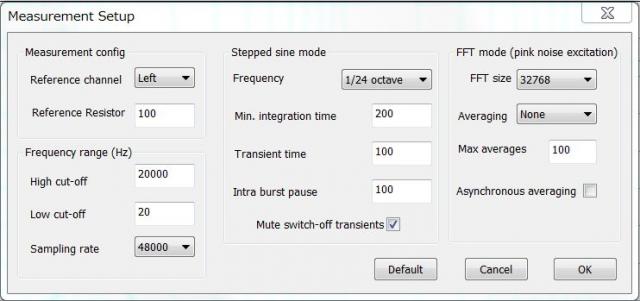
- Setup / Measurement
LIMPのメニューのSetup / Measurementで表示するウインドウ上で、Measurement config 内で 「Refference channel」の「Left / Right」 を正しく選択します。 どちらか迷う場合は、ひとまず測定してみておかしければ逆にしてみる、という手順で大丈夫。 平均化などは必要に応じて試してみるとよいでしょう。
- Setup / Audio Devices

- 測定
- LIMPのメニューの Record / Start か、アイコンの「Start Rec」を選択すると、測定を開始します。
- 測定結果は、例えば下図のように出ます。グラフ縦軸スケールなどは、必要に応じて調整します。
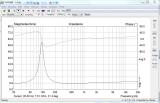
- File / Export As で、「Plain .ZMA」形式データを生成しておきます。
- Speaker Workshop へのインポート
ARTAやLIMPの測定結果は、上の図のように単独表示で確認するところまで可能です。 その先、測定結果データの重ね合わせや、シミュレーションなどは Speaker Workshop へインポートして行うとフレキシブルに活用できます。- ダウンロードはこちらから。
- 左側のプロジェクトペインで右クリックし、「Import」を選択して、LIMPで生成した「.ZMA」データをインポートします。
- 2つのデータを重ね合わせたい時は、夫々のZMAデータをImportした上で
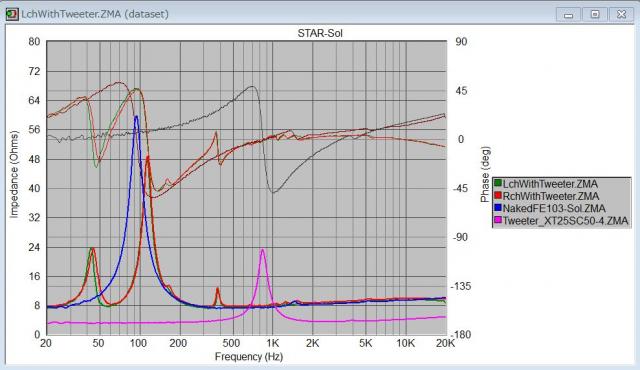
- スパイラルバスレフらしく、FsとF0'間の谷底の広さが広帯域の輻射(ロードがかかっている)状態を示しています。
- 400Hz付近に共振点があるようだけど、何かなあ。 第2空気室単独の共振? それとも気柱共鳴? 原因不明です。
- しかし予想通り、LchのFsが少し低いですね。 ダクトの捻りが強いかな。 修正しなくては・・
- Speaker Workshop は使いづらい面もあるのですが、慣れると本当に便利です。 これを機会に皆さんも始めてみてはいかがでしょう?
