日記一覧
当サイトに登録されている日記一覧



6月に続:ランニングフォームの探究 という記事で、(逆漕ぎペダル式骨盤駆動走法)→別名:逆ローリング走法を提案しまして、GIFアニメをアップしました。
アニメの完成度が今一つだったのと、片足表現のため分かりづらく、上下方向の変位もおかしかったこと、その後の発見もあり、修正版をアップします。(先日の記事へも追加アップ済み)
今日は僭越ながら、もう少し突っ込んだ解説をしてみます。サブ3.5周辺ランナーですのでもっと速く走る人には参考にならないかもしれません。また、上体の動きとの連動も重要です。それについては、後日また記事にしたいと思います。
また、フォアフット走法とのマッチングについても後日の日記に書きましたので、そちらも参考に。
→更にフォアフットとの相性がバッチリな、Neo 逆ローリング走法 を記事にしましたので、そちらを参照下さい。
以下、旧バージョンの解説です。

【改良版】GIFアニメ/(逆漕ぎペダル式)→別名:逆ローリング走法/骨盤への力の方向
試していてわかってきたことは、着地直前に後方への力の保持を終わる時に、脚の重さを感じつつ脱力することで、脚の自重と後方への慣性力を股関節を中心として「後方へ自然にスイング」するように一瞬だけ地面に伝え、脚に力を込めることなく太ももを「つっかえ棒」のように地面と体の間に食い込ませるようにする、そうすると力を入れずに推進力と反発力の両方を得ることができるというものです。
この方法がハマれば、動く歩道に乗っているような感覚で実にリラックスして走れることがあります。いつもそうなるには、タイミングや荷重加減などの調整練習と慣れが必要で、私もまだ修行中です。
以下、左脚が赤、右脚が青として説明します。
- ↓この直前に、左脚(赤)を股関節を中心として左脚を自重でスイングするように脱力して着地を迎えます。あまり上方から脱力すると、スイングによる着地衝撃が強くなりすぎて膝や足に負担がかかるので要注意。膝もブレーキがかからないように脱力。
")
- ↓脚のスイングのおかげで、脚が自然につっかえ棒になってくれるので、体重を預けることができます。但し、ここで膝下で地面を後方にひっかくように引っ張ってはいけません。ハムストリングに過度に負担がかかってしまうからです。
")
- ↓重心真下をつま先が通過する時に最大荷重を受けます。荷重を一瞬で終えるのか、少しの時間長めに分散するのかによって、脚のつっかえ棒との加減も変わってきます。この辺の調整は再現性があるので、練習によってベストな荷重分散時間・タイミングが見つけられそうです。
")
- 左脚(赤)の股関節は地面からの反力のうち前方への分力をもらって少しの間、前方に移動します。これを受けて反対側の右脚(青)の股関節は、反作用により積極的な後方への荷重保持が始まります。
")
- 右脚(青)の股関節が後ろに引かれる荷重がかかることで、右脚太もも・膝がすっと前方へ振り出されることになります。
")
- 左脚(赤)は大転子が前方に出始めたら、若干上方向に吊る感じとします。右脚(青)は、太ももの振出が終わり、脛部分の振出しに変わってゆきます。
")
- 左脚(赤)は前方から上方への吊上げ荷重に回してゆきます。
")
- 左脚(赤)は上方への吊上げから後方への荷重に回してゆきます。
")
- 左脚(赤)は後方への荷重に移行してゆきますが、上方への吊力も維持しつつ回す感じです。右脚(青)は接地直前まで後方力を維持するか、少し早めに脱力するかで、タイミング調整することで、直後に脱力した時の脚の自然スイング力を調整します。
")
- 右脚(青)はこのタイミングでは脱力開始か、脱力が終わって脚の自然スイング動作に移っています。
")
- ここからは、画像1~10の左右反対の動作になります。
")
三菱電機のシーケンサラインアップに、ユニバーサルモデルの高速タイプ Q03UDV, Q04UDV, Q06UDV, Q13UDV, Q26UDV が加わりました。
多くの魅力があるので、早速案件で使おうかということになっています。
メリット
- 超高速処理
- LD命令が、ユニバーサルモデルの9.5ns --> 1.9ns
- PC MIX値が、ユニバーサルモデルの60命令/μs --> 227命令/μs
- CPU内蔵デバイスメモリを、最大60Kワードに容量アップ。
- 内蔵Etherポート経由で、CSVロギング機能を提供
などなど、従来の価格ほぼ据え置きでの性能アップは嬉しいですね。
しかし、モーションコントローラの時でもそうだったのですが、こうした高速化の時には命令毎に高速化の度合いが違うので要注意です。
今回、三角関数などの浮動小数点計算とCALL命令周りの速度アップが芳しくないので注意しましょう。 
| 単位:μs | QnH | Q04UDEH | Q04UDV |
| LD, LDI, AND, ANI,OR,ORI | 0.034 | 0.0095 | 0.0019~0.0078 |
| OUT | 0.068 | 0.0095 | 0.0039~0.0078 |
| $+ S D | 29 | 8.1~13.9 | 1.9~6.2 |
| BMOV S D K1 | 7.1 | 5.4~7.0 | 1.8~5.5 |
| BMOV S D K96 | 14 | 5.9~7.6 | 2.3~6.0 |
| SIN(単精度) | 50 | 4.1~5.7 | 1.6~6.7 |
| SINP(倍精度) SIND | 837 | 8.5~13.8 | 2.6~20.5 |
| CALL Pn(ファイル内) | 0.88 | 2.6~4.0 | 0.9~0.9 |
| CALL Pn(共通ポインタ) | 14 | 4.0~5.3 | 3.2~12.3 |
| CALL Pn S1~S5 | 48 | 28.7~33.4 | 8.5~29.5 |
あと、この記事執筆時点では、パソコンからPLCのEthernetポート直接アクセスに関して、EZsocketライブラリのバージョンアップが行われておらず通信できません。
MXcomponentのライブラリのほうは既に提供されています。
先週の館山若潮マラソン(フル)の撃沈に続き、今日も旭市飯岡しおさいマラソン(ハーフ)で失速して参りました!
ここは終始フラットで、真冬ということもあり記録が出るコースです。一昨年はここで自己ベストの1:35:56をたたき出しています。 シューズも、その時に履いたTartherZeal4を今日も選択しました。
スタートはCブロック。周りの人たちに引っ張っていただく作戦で、前半はよく引っ張っていただきました。


どうにか100分は切りましたが、13キロくらいからスピードダウン・・
グロス:1時間38分48秒
ネット:1時間38分37秒
部門順位 99位/ 562人
総合順位 190位/1344人
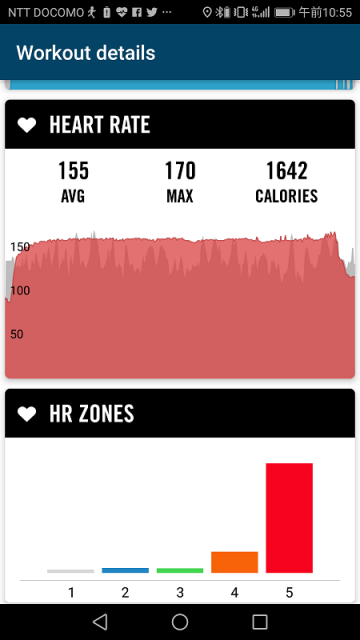
スタート直後から、心拍数ゾーンが5、10kmレースじゃあるまいし、そりゃ後半失速するわなあ。出張続きで3キロ増えた体重を落とさないと、どうにもならない気がします。
ゴール後に、恒例のいちごを食べて、豚汁とおしるこの無料配布をいただきました! ここはローカル色がとっても素敵な大会です。毎年出たいですね。

残るは3月の古河はなももマラソンです。もっと練習して、体重も落とさないと、状況は改善しそうにないですね。
「積層スピーカーの会」のリニューアルを実行中です。
デザインはまだ変えていませんが、 中身はかなり入れ替えようとしています。 いや、ほぼ入れ替えが終わりつつあります。
特記としては、上のニュース記事にも書きましたが、データベースの登録語と、用語集への他の記事への自動リンクですね。
また、この自動リンクは、別サイトでも設定を行えば表示可能です。 たとえばこのサイトでも
自動リンクの例:
積層SPの会 Wiki
積層SPの会、積層スピーカーの会
バスレフ、スパイラル、フォステクス、Fostex、FOSTEX、ESコーン
積層SPの会 スピーカーDB
FE103E、18W/8531G00、W400A-HR
といった具合です。
まだしばらくかかりますが、リニューアル後をどうぞお楽しみに。 
会社のラン仲間からお誘いをうけ、企業対抗駅伝2018 東京大会 に出走してきました。
5キロなんて短い距離のレースは初めてでしたので、練習方法も手探り、直前1週間のテーパリングも必要なのかどうなのか、前日の食事はどうしたらよいのか、初めてずくしでしたが、どうにか実力通りのタイムで襷を繋ぐことができてほっとしました。 ジューズはドロップの小さい2シーズン前の「Adizero Takummi Ren Boost2 Wide」を引っ張り出してきました。
場所取りにブルーシート持参で早めに会場へ

私は第三走者。結果、21分42秒、まあまあ実力どおり。第二走者の女性以外の男性陣、21分台のほぼ同じような実力で揃ってました。幹事さん、GJ!
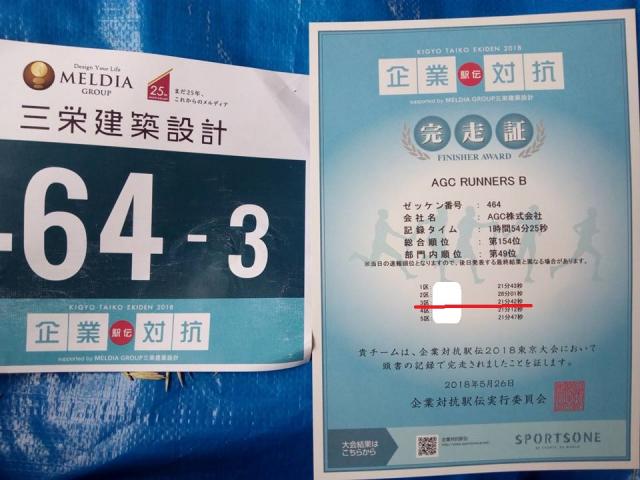

出場したAGC4チームの総合成績です。(全チーム男女混合に出場)
Aチームの5位、おめでとう!素晴らしい!! 同僚のsukkyo君も18分台のすばらしいタイムで貢献しました!
| チーム | No | 部門順位 | |
| AGC RUNNERS A | 463 | 5 | 1:34:07 |
| AGC RUNNERS B | 464 | 49 | 1:54:25 |
| AGC RUNNERS C | 465 | 52 | 1:55:02 |
| AGC RUNNERS D | 466 | 33 | 1:49:07 |
自分一人のレースだと頑張れない時がありますが、駅伝だと「襷を繋ぐんだ」という強い想いが出るのできっちり最後まで力を出し切れますね。 そして短いレースに出るのも、たまには良いと思いました。
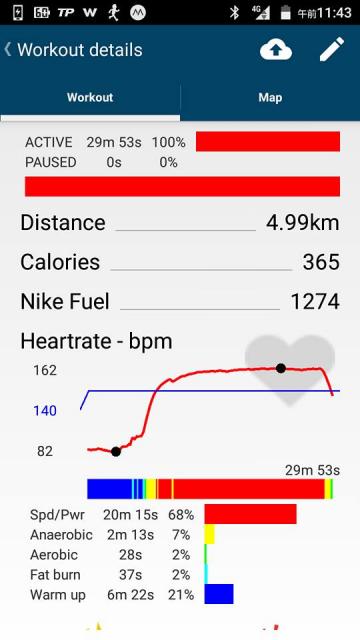
今回はここ2か月ほどの研究の成果、着地直前に少し膝を「その高さで保持する」ことで脛の素早い前傾が働くようにして母指球への荷重をほんの一瞬遅らせ、ノンブレーキで重心真下で荷重する高効率ピッチ走法で走りました。
ピッチで走ると、第二の心臓ふくらはぎポンプの速度アップと、伸長短縮サイクル(SSC)を使ったバネの効率の良い走りができます。 効果があるのが実証できたので、この走法で長い距離でも走れるよう、徐々に距離を伸ばして練習してゆきます。 ただし、練習をずっとこれでやっていると、バネが鍛えられません。 練習は、できるだけストライドを意識して走ります。 そして来シーズンこそ、サブ3.5達成を・・
subakoの「完成」という日は、来るのだろうか。 またまた次なる改良のための日々のスタートです。
") 先週までは、このような格好で「subako-HS」と名づけて聴いていたのですが、いじくり回しすぎて、クチバシが中低域で共振しているし、中域の共鳴も増えてしまった。 中低域のスピード感は最高に近いんですが。 先週までは、このような格好で「subako-HS」と名づけて聴いていたのですが、いじくり回しすぎて、クチバシが中低域で共振しているし、中域の共鳴も増えてしまった。 中低域のスピード感は最高に近いんですが。 |
") 今は、一旦リセットの意味でディフューザーを外し、下向き開口のままスタンドに乗せて鳴らしてます。 まあ普通に鳴ります。 シンプルな音です。 まだ中域の共鳴も聞こえます。 低域の伸びが今ひとつです。 100Hz前後の音質はまあまあです。 今は、一旦リセットの意味でディフューザーを外し、下向き開口のままスタンドに乗せて鳴らしてます。 まあ普通に鳴ります。 シンプルな音です。 まだ中域の共鳴も聞こえます。 低域の伸びが今ひとつです。 100Hz前後の音質はまあまあです。先日、低域の2次・3次高調波歪を簡易に測定して、3D-spiralは2次はそこそこ高い(倍音歪は出る)が、耳につきやすい3次高調波歪は少な めなような気がする、という結果が出ていまして、まだまだ3D-スパイラルの可能性を突き詰める余地があるのではないか、と思いが強くなりました。 |
て、色々妄想しています。 下向き開口の方が自由度が高いですし、スタンドによる低域のホールド効果も期待できますから、トータルでうまく作れば、少なくともsubakoHSよりは完成度が上がる予感がします。
しかし、具体的にどうするか・・
最近、3D-spiralのご本家Takenakaさんは「 角型スパイラル(階段式スパイラル)」に完全に移行しました。 どうやらこの方が音質がよさそうです。
というわけで、subako君は分解するわけにもいきませんので上部はそのままで、今までのようなディフューザーではなくて、新たに角型ショートスパイラ ルBOXを製作して、その上にsubakoを置くという考えにたどり着き。 あわよくば、現状35Hzがやっとこさですが32Hzまで伸延できるかもしれ ません。(8cmクラスで32Hzのハードルの高さは、過去の実験やら他人の事例やらで経験済) そしてスピード感もそれほど落とさずに・・ そんなうま い話があるかな? いや、うまくいけば可能、鴨 ・・ 「3D-スパイラルだから、ここまでできたんだぞー」って言えるようなものが・・
肝心の角型ショートスパイラルBOXの設計がまだ、どんな構想で行ったらよいのか、思い至っておりません。
しばらくの間は、妄想の日々です。
 2
22013年MC後の中古車「LAFESTA Highway STAR 2.0G FF」を契約しました。
- 仕様
- ボディー色:アルミニウムシルバー
- 左側オートスライドドア、キーレスエントリー
- ディーラーオプションナビ(MC-312D-A)
- 納車前追加DOP
- プラスチックバイザー
- ビルトインETC
- メンテプロパック18
- 型式:DBA-CWFFWN
- 次回車検:平成28年3月
- 走行距離:2,124Km
- 購入価格:1,930,000円(税金・諸費用・諸経費・名義変更・陸送込)、下取り車無、 ETCセットアップ別
この1年、大物の仕事を処理するためにほとんど休みなしで突っ走ってきたので、愛車のB30 LAFESTA 20S が来年1月下旬に9年目の車検を迎えることはわかっていても、どうにも動けずにいたのですが、ある程度仕事が落ち着いてきたので検討を始めてみました。
当初、新型X-TRAILに3列シート車が加わったので期待したが、3列目の足元は緊急用途以外の何物でもない狭さなので早々に検討から外した。
次に、今までノーマークだったマツダからのOEM車 (日産)「LAFESTA Highway STAR」がすこぶる評判が良いようです。灯台もと暗し! ・・例をあげれば、価格コムの自動車満足度ランキングでは、本日時点で全車種中、
- 総合:1位
- 走行性能:1位(これはちょっと上げすぎかと)
- 乗り心地:3位
などとなっておりました。(但し最近1年間の投票実績にて)
- と思っていたら、2年乗った人が今更の低評価レビューでランキングガタ落ち。セダンと比べりゃ走行性能も乗り心地も悪いのは当然だし、重量のあるミニバンでそこそこの燃費出しているのに燃費評価1はひどいなあ。デタラメなのはおそらく高速で飛ばしすぎるこの人の運転。ミニバンの特性を全く理解しない、車にこだわりの無い人に必要以上に低評価をされた車がかわいそう。
 面白味の無いトヨタのセダンでも乗ってればよかったのにね。
面白味の無いトヨタのセダンでも乗ってればよかったのにね。
OEM元の「プレマシー」の試乗レポートも数々読みましたが、走行性能・特にハンドリングに関してべた褒めの記事が多く、大変気になる存在に。。足回りの詳細は以下の記事を読んでみると、なかなか説得力があります。
- 日本車の走りに味がない原因がわかった!(CLICCCAR.com)
- マツダ「プレマシー」インプレッション (Car Watch)
- 新型プレマシー ダイナミックフィールの統一感 (2010年マツダ技法PDFダウンロード)
また、今年1月にマイナーチェンジを受け、パワートレインが
- エンジンが直噴ミラーサイクルのSKYACTIV-G
- ミッションが6速ATのSKYACTIV-DRIVE
に(FFの主要グレードは)変わっており、JC08モード燃費も1.5Tonの車重+2Lエンジンにもかかわらず14.0Km/Lから16.2Km/Lへと2割近い改善がなされています。
もちろんOEM先のLAFESTA Highway STARも、SKYACTIVという呼び名では無いものの中身は同じパワートレインを積んでいます。 変速レスポンスも良いようですし、一方で駐車場や渋滞中などの低速運転時には発進が穏やかになるようにセッティングされているなど、なにかと賢そうで期待できます。
以上を踏まえて、続きは詳細経緯と内容です。
購入動機と要求事項
- 6人乗るのは、月に1回程度あるか無いかの家族全員での外食の時のみ。定員フル乗車で長距離を走ることはまず無く、3列めに広いスペースは必要としないため、走りの面白くない箱型ミニバンは候補外で、ステーションワゴン型のロールーフミニバンから選択となる。
- 仕事で荷物を載せて中距離・長距離の出張があるので、高速の安定性・静粛性が高くトルク感のある車が向いている。そういう意味では、現車のLAFESTAも低速トルクの大きなエンジン+CVTで運転は楽だがロードノイズが騒々しい。これがどの程度改善されるのかは、実際に高速道路を走ってみないとわからない。
- 昨年9月にE12ノートを購入し、日頃の省燃費性能とイザという時のスーパーチャージャーによる鋭い加速で活躍の機会が広がり、実質ファーストカーとなっていた。
- それに伴いLAFESTAはセカンドカー扱いに降格していたのだけれど、1月の車検を通すかどうか迷いどころ。 下回りからギシギシ音が出だしたし、突っ張るサスと不整路でのバタツキにも飽きたので、良い車があれば買い替えたかった。
- あらゆる場面でノートの出番が多く、LAFESTA後継車の予想年間走行距離は、8,000Km程度と少ない。 昨年ノート購入の際に実現できなかったハイブリッドカーも候補に挙げて検討し、予算が許せばぜひ乗ってみたいが、走行距離が少ないので燃費だけでのメリットではコストメリットは全く無い。
- 4年後に二男くんが高校を卒業すると、同居家族は妻と両親の4人だけとなる。 今回、買い替えを見送るという選択もあるが、その場合は2年後に乗り換え候補とする車選びが非常に難しい。 今からであれば4年間は乗れる(6人乗る準備を常に必要とする)ことになるが、3列シート車に乗るのは多分これが最後であり、自分の乗りたい車を購入したい。
候補車
- (日産)LAFESTA Highway STAR
- (マツダ)PREMACY
- (日産)X-TRAIL(3列シート)
- (トヨタ)PRIUS ALPHA(7人乗り)
- (トヨタ)WISH
評価結果
LAESTA Highway STAR 2.0G 2WD
- エクステリア:△+
フロントはOEM元のプレマシーに比べて日産顔ともいえるメッキグリルに換装され、万人受けしそうだし自分もこれは好み。サイドも無難にまとめているのだが、残念ながらリヤのセンスの良くないコンビランプ形状はどうにもできずにそのまま。横一線のメッキガーニッシュで多少緩和してはいるのだが、このお尻を毎日眺めるのは慣れるまでは我慢を強いられそうだ。アルミニウムシルバーは日産のシルバーよりも濃い目で、商用車臭さが出にくいので良さげ。

メテオグレーもかなり濃い目なので、田舎の土埃環境では手入れが大変なので敬遠した
- エクステリア:△+



- インテリア:△
まとまりが無いとはいえないが、プラスチッキーな各部の見た目と収納の無さは減点。前席のカップホルダーは使いづらそう。2列目のカラクリシートは良くできているのだが、我が家の用途では活用する機会があるかどうか少々微妙なところ。3列目の足元は現車LAFESTAと同程度。
- インテリア:△
- 走行性能:◎
各試乗レポートやクチコミの評判どおり、素晴らしいと思う。 コーナーでステアリングを切り込むほどにほんの少し前輪が沈み込み、吸いつくような感覚で突っ張り感無く実にスムーズに曲がってゆく。速いかどうかはともかく、気持ちの良い爽快なコーナリングだ。 ダイヤゴナルロールを煮詰めただけでなく、アクセル・ブレーキとのGの繋がりに拘ったというアピールは確かにわかるし、それが交差点の右左折時にも感じ取れるのが素晴らしいところ。
エンジン・6ATも変速ショックが少なく、広いロックアップ領域による高いダイレクト感がトルク感を生んでいるし、エンジンブレーキの効きも良いので違和感が無い。
OEM元ではSKYACTIV-G,SKYACTIV-DRIVEと呼ばれる最新のパワートレイン。但しアテンザやアクセラのような4-2-1排気をもつ圧縮比13のタイプではなく、圧縮比12でトルク・パワー・燃費全てに若干劣る。なお、2013年MC前はアイドリングストップ用の第二のバッテリーがあったが、1台にまとまった。 今回燃費はそれほど気にしないのだが、CVTより単純に伝達効率の良いステップATがミラーサイクルエンジンと組み合わされ、田舎の定地走行では伸びるだろうとの予想。中~長距離出張でもそこそこの燃費が出てくれることは期待。でも加減速の頻繁な市街地ではCVTのほうが有利であって、ちょい乗りでは期待できない。
今回燃費はそれほど気にしないのだが、CVTより単純に伝達効率の良いステップATがミラーサイクルエンジンと組み合わされ、田舎の定地走行では伸びるだろうとの予想。中~長距離出張でもそこそこの燃費が出てくれることは期待。でも加減速の頻繁な市街地ではCVTのほうが有利であって、ちょい乗りでは期待できない。
- 走行性能:◎

- 乗り心地:◎
リヤマルチリンクサスのおかげか、不整路でもバタつかない、突き上げ感が少ないまろやかな乗り心地。 - 総得点が高く、外見よりも中身が重要なことから、これに決定した。但し値落ちの激しさがあるので新車は見積もりもネゴもしてみたが断念し、程度の良い中古が出てきているところなのでそれを狙っていった。
千葉県北部や茨城県南部では安価な中古が少なく、タマ数の多い神奈川県で シルバーとグレーの現車を見たうえで、アルミニウムシルバーに決定した。
- 乗り心地:◎
PREMACY 2.0S SKYACTIV
- エクステリア:×
フロントの笑い顔は、自分も含めて家族全員、受け入れ難い。 サイドの流れラインは見慣れないためか良さが分からない。 リヤもラフェスタHSと同様にセンスが良くない。 - インテリア:△ LAFESTA Highway STARに同じ
- 走行性能:◎ LAFESTA Highway STARに同じ
- 乗り心地:◎ LAFESTA Highway STARに同じ
- エクステリア:×
X-TRAIL(3列シート車)
- エクステリア:△
デザインは良いのだが、SUVとはいえ全幅1,820mmは大きすぎ。 - インテリア:×
自分的にデザインは好み。 しかし、3列目の足元は緊急用と割り切れる人でないと無理だと思うほど狭い。完全に体育館座りを余儀なくされる。 もしも月に1度、年に1度しか3列乗車の可能性が無いとしても、それが想定されるのであれば明らかに役不足。
- エクステリア:△
- 走行性能・乗り心地:試乗せず未評価
PRIUS ALPHA(7人乗り)
- エクステリア:◎
サイドとリヤスタイルが特に良く、商用車っぽさが無い。全幅1,775mmはやや大きすぎると感じる。 - インテリア:△
プリウス以下のトヨタのハイブリッド車に共通するが、先進のパワートレインを持ちながら先進性の感じられないインパネと内装には毎度がっかりする。
3列目の足元は現状LAFESTAと同程度でちょっと狭めか。 - 走行性能:△
走り出しが遅すぎる。 右折時に踏み込んでも加速しないのは危険とも思える。発進のたびにパワーモードに切り替える不便さは耐えられそうにないし、燃費以外に運転そのものの楽しさを感じることができそうにない。 - 乗り心地:○
総じて穏やか。 高価な車なのにリヤサスがトーションバーなのにはがっかりだが、整地を走行している限りにおいては乗り心地は悪くない。(当然か) - オプションを付けないと助手席とリヤハッチのスマートエントリーができないなど、価格はアップするばかり。 値落ちの少なさを考えても、LAFESTA Highway Star(中古)より100万円も余分に払ってまで欲しいとは思えなかったし、何より走りにワクワク感が無かったのが残念で仕方が無い。燃費優先に躾けられたハイブリッド車は自分には合わないのだと悟った。
- エクステリア:◎
WISH 1.8S
- エクステリア:○
若すぎるかもしれないが、自分的にはシャープな外観は好みだが家内からは不評。 - インテリア:○
ソツ無くまとまっているが、どちらかといえば若向きかと思える内装。 運転席のエアコン吹き出し口の位置が圧迫感がある。
3列目足元の空間は、今回一番まともだった。 - 走行性能:○-
悪くは無いが、1.8L+CVTでは加速時にエンジン回転数の上昇が大きく、爽快感に欠ける。 これなら現状LAFESTAの2L+CVTのトルク感溢れる加速のほうがずっと良い。 - 乗り心地:○
トヨタらしい乗り心地だが、試乗車は17インチ+扁平タイヤだったので少々ゴツゴツした印象。 - 総じてこれなら買い替えなくても良いなと思ってしまう。
- エクステリア:○
総括
以上により、神奈川県の日産系中古車販売店に出向いて現車確認後、LAFESTA Highway STAR 2.0G FF(アルミニウムシルバー)を契約。 年明けの1月中旬に納車予定。
納車されたら、SKYACTIV-DRIVE 6速ATのマニュアル操作でエンジンを回して、ワインディングロードを気持ち良く走りたい。
アイデアだけは溜まってきました、コンテスト向けスピーカー。
先週末、subakoを使ってARTA+SpWsで占ってみたものの、テスト用に使用したコイルが 0.7mH - 0.4Ω と抵抗値が大きく、 ダンピングが悪化して折角のスパイラルの音の躍動感が無くなりボンついた低音になってしまいました。
悩んだ挙句、一時期あった「あっち向いてホイ」方式を実践することに。。
元々、ネットワークを通すことには消極的だったのですが、 EF103Eをハイカットしてツイーターに引き継いだ場合の音の透明感、奥行き間の向上が忘れられず、なんとかしてフルレンジのままでツイーターと融合できないか、と考えていました。
しかし、FEスルーでツイーターを7KHz程度で12db/Octで繋いでみても、FEの高域とーツイータの合唱は耳障りになるばかりで、逆効果とも言える状態。
# ボンツキのない躍動感や鮮度を取るか、音の透明感・見通しを取るか・・
")
|
そんなとき、先人の知恵を思い出しました。 フルレンジなんて「あっち向いてホイ」 すれば指向性の高い高域はかなり減衰され ツイーターともそのまま繋がりそうです。
予想される特徴は以下。
- 正面か ら見るとバーティカルツインで、定位感バッチリ。 リスニングポジションを多少左右に移動しても、FE103Eの高域のバランスも変わるのでセンター定位 は大きくブレない。 但し、上下方向には多少振れる、席を立ったり座ったりすると、FE103E同士の干渉で5?10KHzのレベルが落ち込みそう。
- フルレンジ側はネットワークスルーなので、何より低域のダンピング悪化もなく、中域のフレッシュさも減退しない。 ついでにネットワークパーツ代を節約できる。
- 内部の3D?スパイラルは2条巻きで、なおかつ上下に入口と出口がクロスする方式に初挑戦。 こうすることで、ダクト出口を上面と下面にしてこれもバーティカルツインとなり、中低域の定位向上と内部容積の有効活用が図れる。
- 上記と引き換えに、当初予定の直径序変スパイラルは不可能となった。 位相を序変することで、ホーン形状とする予定。
- 内部構造は複雑の極み。 けれども元々積層構造で大変なので、設計時間はかかるが製作時間はそれほど大きく増えない(と思う)。
- バッフル板の交換構造は採用できない、たぶん。。
名前は「Twister」、 別名 「ヒネったの?」 です。
今回は、楽しんでできそうな予感がします。

昨日設計をまとめたスピーカーの製作を開始。まずはいつものように内蔵する3Dスパイラルダクトから。
朝からケガキを開始して、10時過ぎからカットを始めて、途中昼寝したり休みながらやったので夜の7時過ぎにようやく終了。
毎度のことながら、暑さと粉じん、そして蚊と闘いながら、汗まみれ粉まみれの切り出し作業だった。
今回はとても柔らかいホワイトウッドだったので切り出しは楽だった。その分、仕上がり状態は荒く、組み立ての際にボルトで締めあげても空気漏れが出そうな感じ・・ まあ仕方ないね。
スパイラル内径110mmは、各ディスクの段差部分の削り込みに使うディスクサンダーがぎりぎり使えるサイズと判明。これ以下のサイズでは今回の製法では製作困難。 アブナイ危ない・・
出来あがったディスク群の片ch分をM6寸切ボルトで締めあげてみたら、なんだかケバブに見えてきて食欲が湧いてきた。 
続きは今週の仕事が暇な時と週末で実施予定。 とにかく音だし出来る状態にしないと調整が間に合わない!
