日記一覧
当サイトに登録されている日記一覧



今年のOMTOMO MOOKの付録は、なんと今や人気急上昇中のMarkAudio製、アルミマグネシウム合金コーンの8cmフルレンジユニット「OM-MF5」! 実は私自身はMarkAudioのユニットを使ったことが無いのですが、巷では大歓迎の様子で期待大です。発売直後の状況を見て、良さそうだとのことで買いました。
フレームが同社の市販ユニットとは違いプレスフレームで、少し板厚が薄めかな? しかしビス5本止め、十分な強度とリヤ開口面積。 制振処理をすればなかなか良さそうな感じです。


自作プリアンプのRchの音が出なくなっていたのですが、やる気を出して基板の裏からさぐってゆくと、ハンダ溶け込み不良2か所を発見し、修正完了。
そしてOM-MF5を、クリアミントにネジ1本で仮付けし音質の確認。2016年のFostexのアルミコーンや、昨年のPioneerのユニットに感じたような高域のクセが少なく、低域もよく出て全域で品位の高い音質と感じます。
ボーカルはFostexに慣れてしまった私の耳には少々大人しめですが、MarkAudioのフルレンジユニットはコーン絞りが浅めなので、そのためか音の広がりに無理がない気がします。
さすがに、FE88-Solと比べると情報量の違いで叶いませんが、中域を中心とした音のまとまり、まとめ易さでは勝っているかもしれません。付録ユニット史上最高音質かもしれませんね。 大好きな松岡直也などのフュージョン系を聞くなら、FE88-SolよりこのOM-MF5のほうが向いています。

コンテストも開催されます。締め切りが12月なので余裕がある反面、参加者全員の完成度が上がって、激戦になること必至ですね。
私も参戦する気持ちが高まってきました。 肝心のアイデアは少しづつ出てきていますが、まだ決定打に欠けます。もう少し、じっくり考えてから設計に着手しよう。
タグ CX-30 MAZDA SPIRIT
MAZDA SPIRIT UPGRADE D1.1 実施してきました!
個人的には、実施前後のTorqueProでの比較はデータ更新周期が追い付いていなくて微妙な感じでしたが、実施の効果は明らかで、やってよかったです。 五万円の価値は、、人それぞれということで。
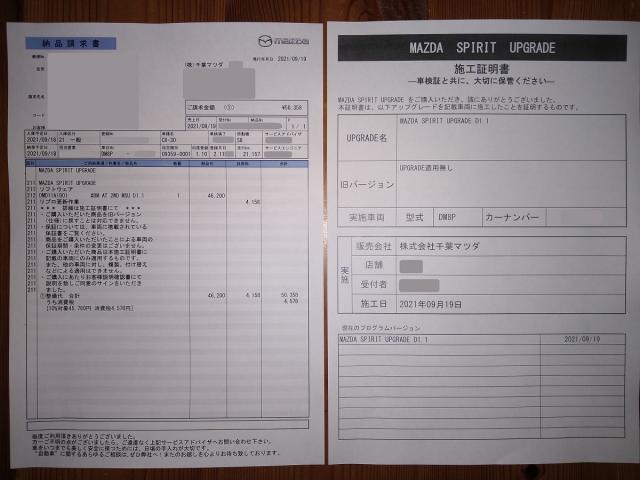 |
■MAZDA SPIRIT UPGRADE D1.1
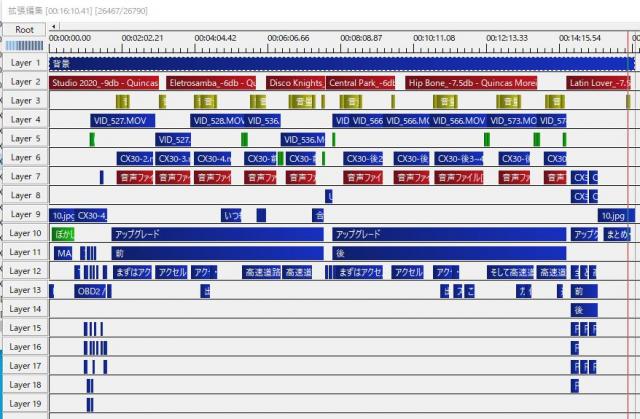
アップグレード実施前後の比較動画(オリジナル長編版)
■OBD2/Torque Pro を使用して、走行データ表示画面でグラフ表示させ、前後比較を行ってます。
◇発進加速
- アクセル開度40% ゆっくりめ
- アクセル開度40% 早め
- アクセル開度80~100%全開 / 40~60km/h中間加速
◇高速合流
◇実行前後比較とまとめ
◇映像は安物ドライブレコーダー、スマホスクリーン動画との 合成でタイミングが若干ズレていたりしますがご容赦願います。
■MAZDA SPIRIT UPGRADE D1.1
アップグレード実施前後の比較動画(短編解説版)
■MAZDA SPIRIT UPGRADE D1.1
- EGRバルブ制御を中心とした、エンジン制御のブラッシュアップで 発進時などアクセルを踏み込んだ時のもたつきを改善。
- 最大トルク発生回転数を超えた領域でのトルク改善で、最高出力を116ps→130psにアップ。 など
https://www.mazda.co.jp/carlife/spirit-upgrade/d11/
●個人的には、発進時のもたつきが気になる人、高速でもっとパワーが欲しい人には、アップグレードをオススメします。
この動画が参考になれば幸いです。
いやー、それにしても、AVIUtilsでがっつり動画編集は慣れないこともあって大変でした。
 |
そして最後の1文で力尽きて変換ミスをやらかしました。 
「アクセルオン時の応答性の向上と3000rpm以上のトルクアップを時間できました」
↓
「アクセルオン時の応答性の向上と3000rpm以上のトルクアップを実感できました」
■CX-30  L-Package (FF)
L-Package (FF)
■BGM Youtube Free Lisence Music
Channel:Quincas Moreira
https://www.youtube.com/channel/UCL1zFMJb0sthwdAlGjGbdyg
https://www.youtube.com/hashtag/quincasmoreira
- Studio 2020
- Eletrosamba
- Disco Knights
- Central Park
- Hip Bone
- Latin Lover
良い楽曲と演奏です。ありがとうございます!
mbedで色んなことが簡単に出来るだろうことはわかったけど、遊びと勉強ばかりでは面白くないので、仕事に何か応用できないかと考えた。
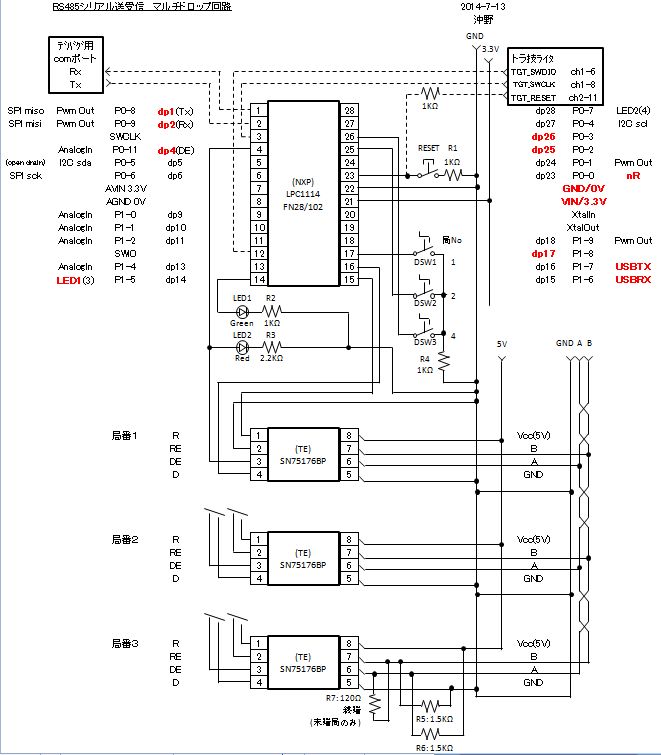
そこでこの時にVB.netで作ったRS485通信のPC内シミュレータを、mbed LPC1114に移植できれば複数台の通信確認が取れるなと考えて、RS485通信トランシーバIC (TE)SN75176BP とブレッドボードその他を購入しやってみました。 
今回は、3台分の機器側に成りすますシミュレータをブレッドボード上に配線します。 ブレッドボード上に1台ずつ、計3枚の普通のブレッドボードが必要。
- 購入部品 (LED、抵抗、配線材などは手持ち品を流用)
名称 型番 購入先 数量 単価(税抜) 普通のブレッドボード EIC-801 スイッチサイエンス 3枚 257円(税込) mbed対応マイコン LPC1114-FN28
生産中止(?)品秋月電子通商 3個 120円 RS485/RS422トランシーバIC (TE)SN75176BP 秋月電子通商 3個 80円 ディップSW 5P 秋月電子通商 3個 60円 タクトSW 各色 秋月電子通商 3個 10円
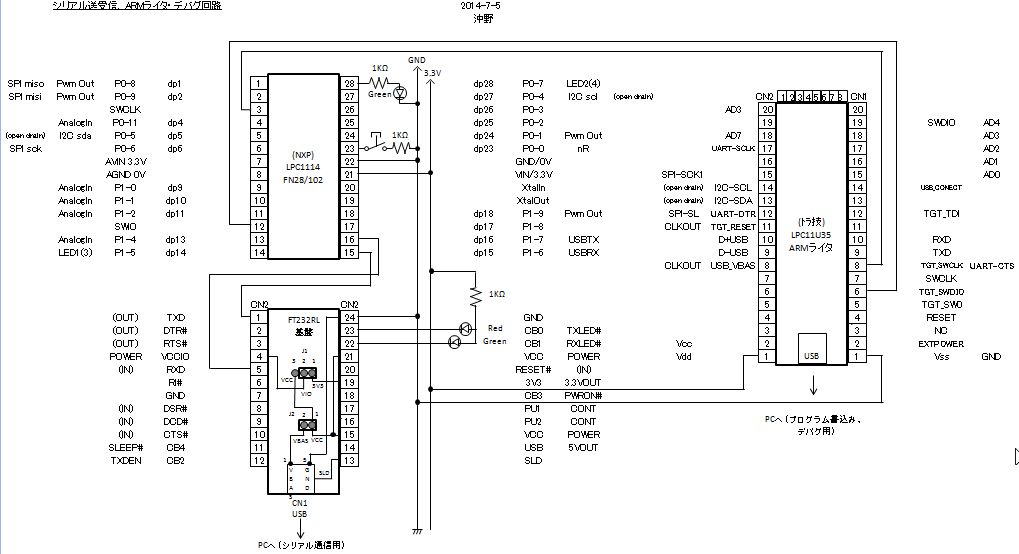
- 配線図
- 電源はトラ技ライタ経由USBから取る。
- ディップSWで局番(今回は1~3)設定可能とする。
- SN75176BPのDE端子は、機器1台なら3.3V印加しておくだけでOKだが、機器2台以上マルチドロップの場合は、マスタからのコマンドに返信するとき以外はバスを解放する必要があるため、マイコンのdp4を返信直前にHigh、返信後20msec後にLowとするソフト処理を行う。
- マイコン側は3.3Vなのでこのままで良いか不安もあったけど動いてるから大丈夫?
- マスタ側ソフトは、このディレイ時間20ms分の待ちが必要。
- この信号のHighの時に赤LEDを点灯させる。
- RS485バスラインのプルアップ抵抗(R5)、プルダウン抵抗(R6)の抵抗値は、実際の路線長で決める必要があると思うのだけど、今回はテストなので小さ目の抵抗を入れてみた。
- 生存確認用にLED1を点滅。 UARTポートと共に割り込みプログラムとする。
 |
- プログラム
- 今回は、仕事の秘匿義務の兼ね合いもあるので非公開です。すみません。
- コーディング・デバグは、ある程度の段階でmbedオンラインコンパイラからエクスポートして、μVision4にて行いました。
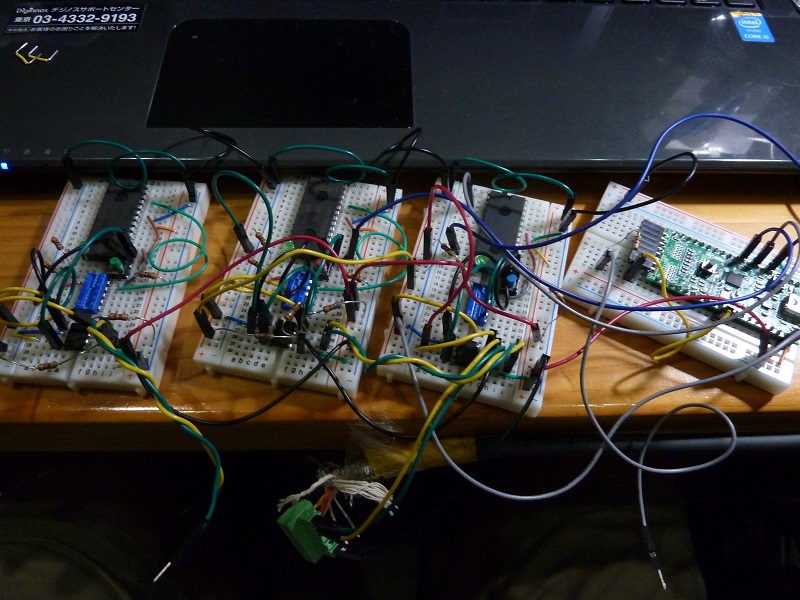
- 配線状況
テストなのでヒドイ状態ですね。(汗)下記動画の際には少しだけ整理しました。
- 動画
PLC側のテスト画面と共に映してみました。ボーレートは38,800bps。
機器1→機器2→機器3と通信先を切り替えてサイクリックに通信します。 機器側が受信し送信中に赤LEDが点灯します。 1回のコマンドで1点灯で、点滅回数分のコマンドを処理しています。
今後も仕事で通信案件が来た時には、こんな感じでシミュレータを作って事前テストするですね。 部品単価が安いので、USB/RS485コンバーターを買うよりずっと安価にできますし。 
ここまでテストばっかりやってきたけど、そろそろ実際に動かす何かを作るかなあ。。 
まずは現物から
- LPC1114FN28とFT232RL USB/serialコンバーターで、シリアル通信+サーボモーターを回してみる。
以下、準備から実際のプログラムソースまでメモっておきます。

まず頭に入れてくべきこと 
- mbedオフィシャルサイト 全てはここから始まる。
- mbedとは:Wikiedia
- mbed と Arduino の違い
準備したもの
- mbed対応のマイコン。今回は、LPC1114FN28 を、秋月電子で購入。 1個たったの120円!(税込)
- USB-シリアル変換モジュール FT232RL 秋月で購入。
- Arduinoスターターキット SGK-ARD-KIT 千石電商で購入 arduino uno 付きで4,940円。 arduino unoの他に付属のセット品が色々入っていて、初めてには良いですね。 arduinoからいじり始めてみたものの、mbedを教えていただいたら断然そちらが面白くなってます。
配線
- 参考
- mbed LPC1114でLチカしてみた(1):しなぷすのハード製作記
マイコンとFT232RLの接続が参考になります。 プログラムを書き込んだあとリセットしなくても済みます。 なお、書き込みソフトはこのページの要領ではなく、LPC1114限定で下記ページのものが使いやすいです。 - mbed LPC1114でLチカしてみた(2):しなぷすのハード製作記
LPC1114限定で「LPCISP」というソフトを公開しておられます。USB/serialコンバーター経由で一発書き込み、即座にリセットが働くので、楽ちんです。")
- mbed LPC1114でLチカしてみた(1):しなぷすのハード製作記
")
- ハード図
ブレッドボードを使うとテストは楽にできるけど、一度バラしたら再現するのが面倒になっちゃいますんで、ちゃんと図面を書くクセをつけたいですね。今回は資料への使いまわしがしやすいようにEXCELでこんな感じで書いてみました。- LPC1114のLED回路はソース出力(PNP)でプラスコモン、FT232RLのLEDモニタ回路は、シンク出力(NPN)でマイナスコモンになっているみたいで、ちょっと混乱します。
工業用制御部品に関していえば、日本国内やアジア圏ではシンク(NPN)でマイナスコモン、欧州ではソース出力(PNP)でプラスコモン が多いですが、欧州への輸出時にはCEマーク表示の関係で本質安全の考え方から必ずPNPにしないといけなくなるため、国内でもPNPへの変更が徐々に進んでいる・・ のかなあ?
組み込み部品での状況は全くわからずです。
- LPC1114のLED回路はソース出力(PNP)でプラスコモン、FT232RLのLEDモニタ回路は、シンク出力(NPN)でマイナスコモンになっているみたいで、ちょっと混乱します。
") |
 |
プログラム
mbedはarduinoと違い、ほぼ素のC/C++で書けます。 オンラインコンパイラでビルドが通ったプロジェクトをエクスポートして、外部のIDEで編集・コンパイルできることからもそれを実感できます。
とはいえまずはオンラインコンパイラで。
") |
使用ライブラリ
- Servo
mbedのオンラインコンパイラ上の「Import」でキーワード「Servo」で検索し、sford cstyles さんの mbed R/C Servo Libraryを試しに使ってみました。 - MySerial
自作ライブラリ MySerial です。mbed標準のRawSerialクラスを継承し、受信文字列のchar配列格納を簡単にできるようにしてみました。 現時点でのソースを貼っておきます。- GetString メソッドは、テンプレート化でオーバーロードしてあり、引数にポインタ変数指定でも char配列指定の参照でも使えるようにしました。
- Wait時間の設定を追加してあります。
その他APIは、こちらを参照。
- MySerial.h


1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82
- | | | | | | | | | ! - | | | | | | | | | | | | | | | | | | | | | ! - | | - | | | ! | | - | | | ! | | - | | | | ! | | - | | | | ! | - | ! | | | | | !
/** mbed Serial Library extend RawSerial * Copyright (c) 2014 Naoki Okino * * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR * IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, * FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE * AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER * LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, * OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN * THE SOFTWARE. */ #ifndef MBED_MYSERIAL_H #define MBED_MYSERIAL_H #include "mbed.h" /** MySerial control class, based on a RawSerial * * Example: * @code * #include "mbed.h" * #include "MySerial.h" * * MySerial pc(USBTX,USBRX); //instance of MySerial Class * char cWord[16]; //receive chars or cWord[256], cWord[1024] etc.. * * void readbuf() * { * // int iRtn = pc.GetString(6,&cWord); //Serial received chars by pointer cWord * int iRtn = pc.GetString(6,cWord); //Serial received chars byref of cWord * } * int main() { * pc.baud(9600); //set baud rate * pc.format(8, MySerial::None, 1);//set bits for a byte, parity bit, stop bit * pc.SetRxWait(0.01, 0.001); //set wait getting chars after interrupted, each char * pc.attach( readbuf, MySerial::RxIrq ); //Set Interrupt by Serial receive * } * @endcode */ class MySerial : public RawSerial{ public: /** constructor to get chars received by serial * * @param PinName tx * @param PinName rx */ MySerial(PinName tx, PinName rx); /** set wait getting chars after interrupted * * @param float _fRxStartWait wait getting a 1st char after interrupted * @param float _fRxEachWait wait getting each char */ void SetRxWait(float _fRxStartWait, float _fRxEachWait); /** function to get chars after received chars by serial * * @param int size for get chars * @param *cWord returns got chars by pointer * @param returns success by 0 */ virtual int GetString(int size, char *cWord); /** overload function to get chars after received chars by serial * * @param int size for get chars * @param cWord returns got chars by ref * @param returns success by 0 */ template <class X> int GetString(int size, X cWord) { return GetString(size, &cWord); } protected: float fRxStartWait; float fRxEachWait; }; /* class MySerial */ #endif
- MySerial.h
- MySerial.cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
- | | ! - | | ! - | | | | | | - - | ! | - | - ! | | ! !
#include "MySerial.h" MySerial::MySerial(PinName tx,PinName rx):RawSerial(tx,rx) //constructor { fRxStartWait = 0.01; //wait getting a 1st char after interrupted fRxEachWait = 0.001; //wait getting each char } void MySerial::SetRxWait(float _fRxStartWait, float _fRxEachWait) { fRxStartWait = _fRxStartWait; //wait getting a 1st char after interrupted fRxEachWait = _fRxEachWait; //wait getting each char } int MySerial::GetString(int size, char *cWord) //by pointer { int i=0; int ichar; memset(cWord, '\0', strlen(cWord)); //initialise chars wait(fRxStartWait); while(1) { if(!readable()) { break; } ichar = getc(); if(i<size) { cWord[i] =ichar; //putc(ichar); } i++; wait(fRxEachWait); } return 0; }
- MySerial.cpp
メイン
- シリアルコマンド
ただの実験なので、<STX><ETX>などの制御コマンドは一切無しです。(汗)- 「start」で開始
- 「pxxx」(xxxは角度)で位置決め
- 「stop」で停止
です。
- 受信の割り込みと、50ms定時タイマ割り込みを受けてメインで動作及びLチカさせてみました。
- 割り込みのIRQ変数名は、シリアルが「UART_IRQn」、定時タイマが「TIMER_16_0_IRQn」でしたので、割り込み優先度や割り込み禁止を個別に管理できます。 この辺の定義は、こちらに全部書いてありますね。
- まだ試していませんが、フロー制御を入れないと9600bps以外では取りこぼしが発生します。
- ソース
volatile のつけ方などわかっていないので、まだ適当です。- main.cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101
- | | ! - - ! ! - | | - ! | - | | - | | - | | | - | ! - | | ! ! - | | - | ! | | | | | | | | | | - | | | - | | | ! | | - | - | | ! | - ! ! !
#include "mbed.h" #include "Servo.h" #include "MySerial.h" Servo myservo(dp18); MySerial pc(USBTX,USBRX); //instance of MySerial Class Ticker timer; DigitalOut led2(LED2); //alive check LED volatile int cntRx=0; volatile int cntRx_old=0; volatile int timeUp=0; volatile int timeUp_old=0; char cWord[6]; //receive chars or cWord[256], cWord[1024] etc.. char *pCword = cWord; //pointer for cword const char ccStart[6] = "start"; const char ccStop[5] = "stop"; const char ccMove_[2] = "p"; int readSize = 5; int doStatus; int iDeg; void atRx() { NVIC_DisableIRQ(UART_IRQn); cntRx++; } void atTimer() { //NVIC_DisableIRQ(TIMER_16_0_IRQn); timeUp++; } void readbuf() { pCword = cWord; //pointer for cword //int iRtn = pc.GetString( readSize, &cWord[0] ); //Serial received chars by pointer of cWord int iRtn = pc.GetString( readSize, cWord ); //Serial received chars byref of cWord if(strcmp(cWord, ccStart)==0) { // start doStatus=1; printf("started\n"); } else if(strcmp(cWord, ccStop)==0) { // stop doStatus=0; printf("stopped\n"); } else if(cWord[0]==ccMove_[0]) { // 1st char matches pCword++; // increment pointer to get after 2nd chars iDeg = atoi( pCword ); printf("%d\n",iDeg); } else { //no action except for start/stop printf(" no match %s\n" , cWord); } if ((doStatus == 1) && (0 <= iDeg) && (iDeg <= 180)) { wait(0.01); // waits for the servo to get there myservo.position(iDeg - 83.0); } } int main() { pc.baud(9600); //set baud rate pc.format(8, MySerial::Odd, 1);//set bits for a byte, parity bit, stop bit //pc.format(8, MySerial::None, 1);//set bits for a byte, parity bit, stop bit //pc.set_flow_control(MySerial::RTSCTS,dp26,dp25); pc.SetRxWait(0.01, 0.001); //set wait getting chars after interrupted, each char wait(0.25); //startup wait pc.attach( &atRx, MySerial::RxIrq ); //Set Interrupt by Serial receive NVIC_SetPriority(UART_IRQn, 120); timer.attach( &atTimer, 0.05 ); NVIC_SetPriority(TIMER_16_0_IRQn, 10); myservo.calibrate(/* range */ 0.00099, /* angle +/- */ 90.0); while(1) { wait(0.01); if(cntRx != cntRx_old) { readbuf(); cntRx_old = cntRx; NVIC_EnableIRQ(UART_IRQn); } if(timeUp != timeUp_old) { if( 10 <= timeUp ) { led2 = !led2; timeUp=0; } timeUp_old = timeUp; //NVIC_EnableIRQ(TIMER_16_0_IRQn); } } }
- main.cpp
")
引き続き、mbedをいじってます。
先日入門したばかりでもとても便利と感じるmbedのオンラインコンパイラ。
オンライン上で先人の公開したライブラリやプロジェクトをさくっとインポート出来たり、自分のPC環境に依存しない、デバイス毎に異なる設定などは予め設定済みで、マイコンの種類を変えても少しの変更ですぐに移植できる、などなどとても良くできていて、私のような初級者には大変ありがたいものであります。
しかしですね、、やっぱりIDEでオフラインコンパイル、ステップ実行デバグをやりたいですね。 ということでmbedと先人の知恵を頼ってやってみました。
- 概要
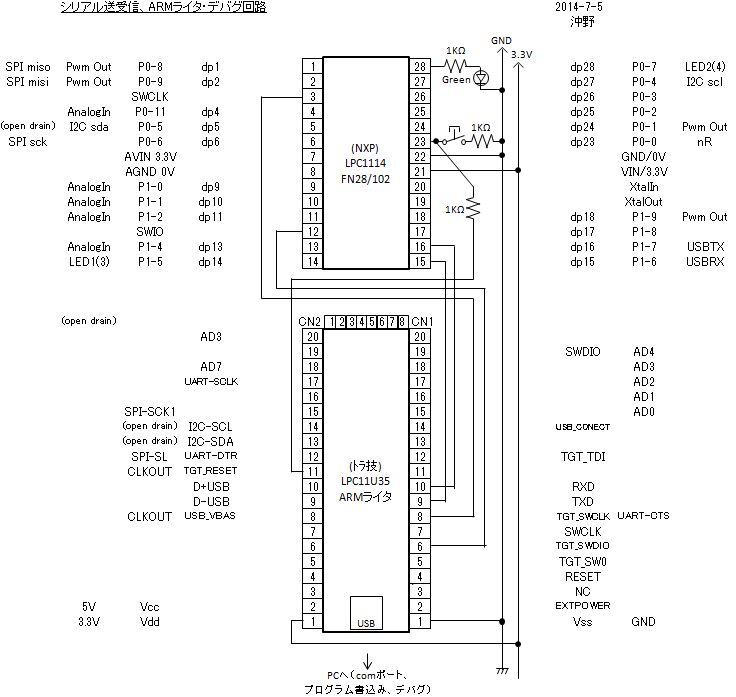
トランジスタ技術2014年3月号には付録にトラ技ライタが付いてくる。 これをEIL-MDK(μVision4)でコンパイルしたバイナリをCMSIS-DAP経由でマイコンにロードするのと、デバグで使います。 UART(USBシリアル)は同時に使えなかったので(やり方がまずかった?)相変わらずFT232RLを繋げています。
もっと楽をしたい方は、素直にSwitchScienceでLPC1114のmbedボードを買ったほうが良いと思います。。たぶん。
→その後、UARTもCMSIS-DAPも同時に接続できるようになり、FT232RLは不要になりました。
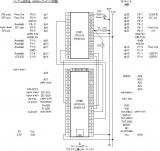
- 接続図
左図ではUART(USBシリアル)用にFT232RLを入れていますが、これは不要になり右図のようにトラ技ライタ側のUARTポートからTx,Rxに繋ぎます。FT232RLあり → なし 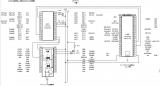
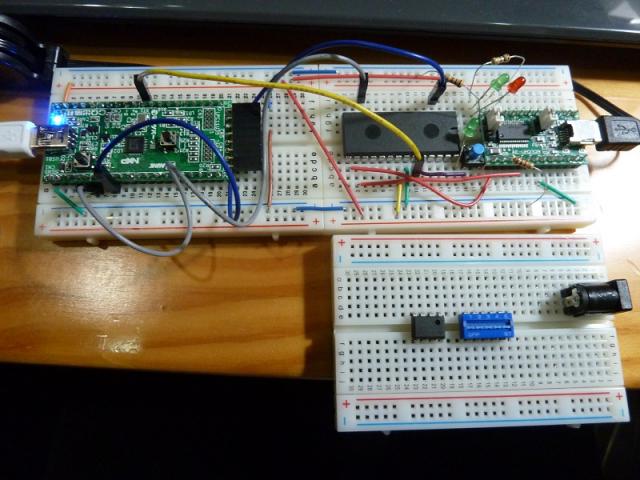
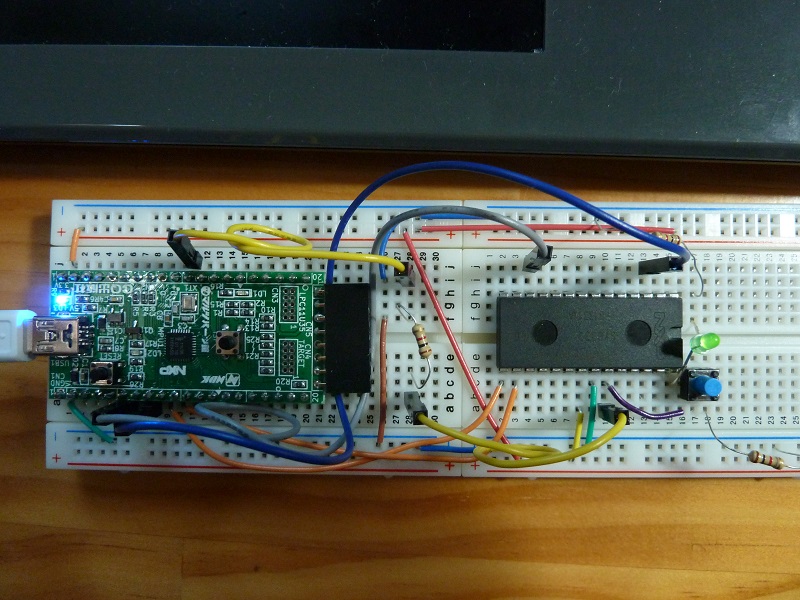
- 現物
左図のブレッドボードの上段左側がトラ技ライタ。右側がLPC1114マイコンとUSBシリアルFT232RL。 右下のは次回テスト予定のRS485ドライバチップとディップSW。 右図はFT232RL無しの最終状態。

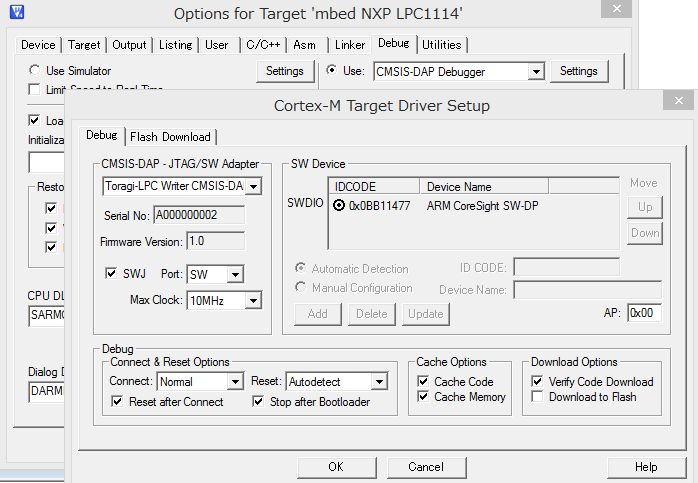
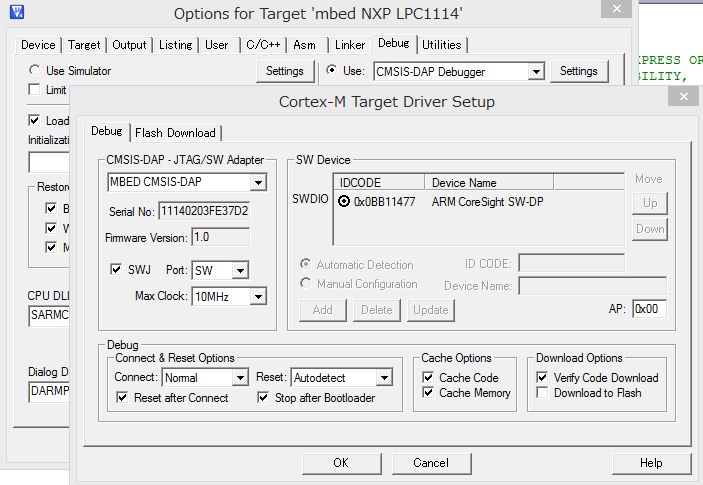
- μVision4でデバグポートにトラ技ライタを指定したところ。 速度は10MHzでも行ける。 μVision5では100KHzまでしか出なくて断念した。
→その後、トラ技のファームウエアではなく、このページのファームウエアに書き換えた後で、トラ技ライタをUSB接続した状態でこのページのUART最新ドライバをインストールしたところ、無事に全て使えるようになりました。 μVision側設定画面はこうなりました。
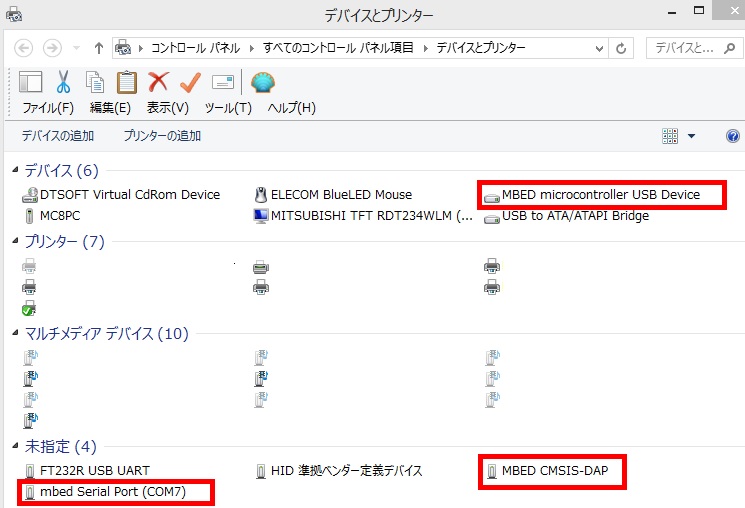
 Windows8.1上のデバイス表示に、3つの接続が出現していればOK。 1つしか出ない場合は、USBドライバがインストール出来ていないです。
Windows8.1上のデバイス表示に、3つの接続が出現していればOK。 1つしか出ない場合は、USBドライバがインストール出来ていないです。

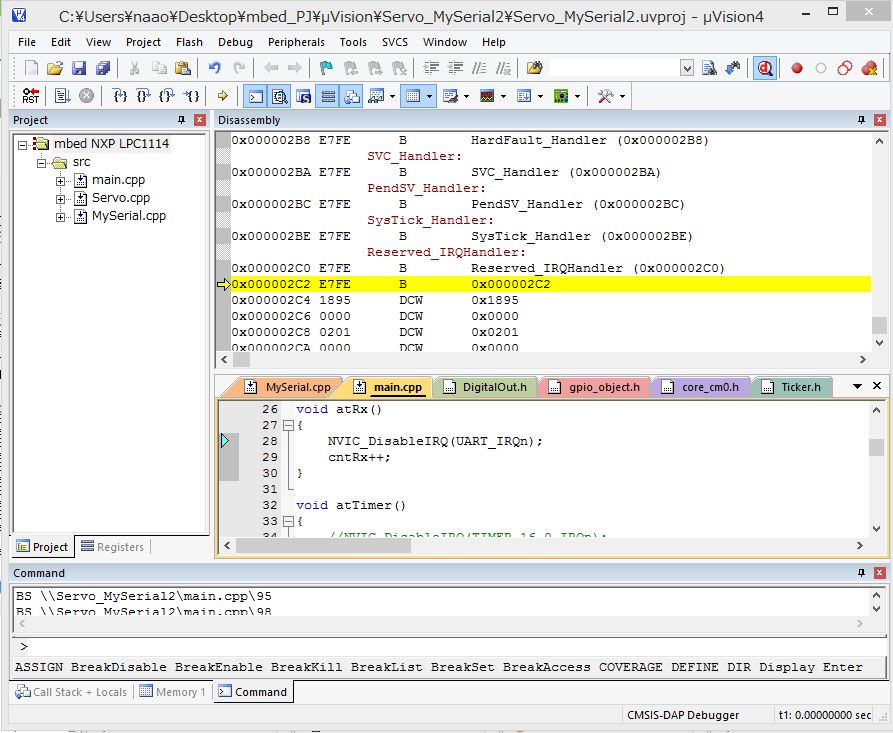
- 割り込みイベントが発生すると、デバグがここで止まってしまい再開不能でマイコンをリセットすることになる。
今のところ解決策がありません、どなたかご存じの方、Help me。
もしかするとリアルタイムOS使っていないとだめなのかな? デバグしなければきちんと動くんだけど・・
→これもトラ技のファームから変えて、さらにnRESET配線1本をきちんと結線することでOKになりました。 nRESETを結線すると、LPC1114に付けたタクトSWでリセットできなくなるので、その際には毎回ライタからのnRESET結線を外してSWを押す、という操作が必要になります。
→上のほうの接続図のようにnRESET中間に1KΩの抵抗を入れることで、そのままリセットも効くようになりました。正しい回路ではないと思いますが、実用上は今のところ問題ありません。
参考:
- トラ技ARMライタを mbed interface にする(LPC1114FN28編)
まさにこれ!と思ってここのファームウエアを試してみましたが、UART(comポート)が出てこない、CMSIS-DAPが出てこない、という状態で断念。 PCがWindows8.1だからかなあ。。
→再度試したところ、下記ページにあるUARTドライバをインストールしたら全てOKになりました。
但し上のページの結線は、何かおかしいです。nRESETの配線が別のところへ行っている気がします。- μVision4でデバッグ!(mbed-MACRUM)
トラ技ライタでは無くファームウエアはここのものは使いませんが、作業の流れはこれが近いです。ファーム書き換え後のUARTドライバはここからダウンロードしてインストールします。 - Keil MDK-ARM v4 のダウンロード
このページのv4のリンクより。 ライセンスフリー版では32Kbの制約があります。v5は通信速度が出なかったです。→これも再度確認したら問題ありませんでした。 - mbedをIDEで使う(野良2-mbed)
μVision4のあたりが詳しいです。
- μVision4でデバッグ!(mbed-MACRUM)
- トラ技のページ
ファームウエアはここから「トラ技ARMライタ基板をCMSIS-DAP(デバッガ)として使うときのファームウェア」をダウロードして流し込みます。→当初はこれでやっていましたが、後で別のファームでOKになり不使用です。- トラ技2014-3月号
ここでまだ買えます。(マルツパーツ館) - 部品セットはここで買えます。(マルツパーツ館)
- トラ技2014-3月号
次回は、この時に仕事で作ったPC上のVB.NetなRS485シミュレータを、LPC1114マイコンに置き換えて通信してみるテストです。
(2019-12-22 まとめページと同じ内容に変更しました。内容も少しだけ加筆しています。)
本ページ記載の内容は、現在はこのままでは非推奨となります。筆者はこの動きと素の逆ローリング走法を合わせた動きを意識して走っています。
2017年の夏ごろから始めた、大転子ランニング指向によるランニング走法の研究。 下のブログ一覧のように2年半の歳月をかけて色々と回り道しながら、ようやく自分に合った効率の良い走法:Neo逆ローリング走法にたどり着きました。
当サイトランニング走法関連ブログ
- 2019-11-17 Neo逆ローリング走法
- 2019-9-23 ズームフライ+フォアフット走法と逆ローリング走法のマッチング
- 2019-9-01 続:ランニングフォームの探究 3
- 2019-8-18 続:ランニングフォームの探究 2
- 2019-6-30 続:ランニングフォームの探究
- 2018-6-2 ランニングフォームの探究
- 2017-9-18 辛い練習はしなくても目標タイム達成可能?
- 2017-8-19 接地荷重時間を短縮するために
- 2017-7-22 大転子ランニング指向
Neo逆ローリング走法の特徴とコツ
2019年11月10日(日)完走の第33回 成田POPランで試した、素の逆ローリング走法のエコノミー改良版です。 仮称→「Neo逆ローリング走法」と名付けてみました。
")
素の逆ローリング走法の特徴は、遊脚を後方へ脱力スイングさせて接地を迎えることで、膝への負担を減らすことでした。しかしその為にはある程度の後方へのスイング速度が必要で、準備段階で脛が前方へ振り出し気味になってしまうため、それを補う動作によってエコノミーがやや低下していました。
今回のNeo逆ローリング走法では、この遊脚の後方への脱力スイングを封印し、より穏やかに接地を迎えることが可能になっているので、フォアフットとの相性もバッチリです。 ポイントは、接地前にシザースで前に出ようとする脚に骨盤(大転子)を引っ張ってもらう感じにすることで、骨盤を後方力で保持しつつ少しづつ前方に穏やかに移動させて、脛を前方に投げ出すことなく足が無理なく重心付近に降りてくるようにすることです。結果的に直後の脚の後方へのスイング速度は下がります。
遊脚の重さを腰に感じながら、骨盤(大転子)を「後方に保持し」、位置的には脚に引っ張られて「徐々に前方に移動」させる。力学的には、前に出ようとする脛の慣性エネルギーを骨盤の移動で吸収する形ですので、結果的に無理なく無駄なく効率的に骨盤が前に出るのです。
みやすのんき氏の膝下だけ「前スライド」の意識からの速度アップのコツとしても有効だと思います。言ってみれば、骨盤・大転子を「前スライド」させるイメージでしょうか。 でも骨盤を自力で前にひねるわけではなく、あくまで脚に引っ張ってもらうわけなので、「腰を前に!」とか「骨盤前傾!」なども無理に意識することなく、割と簡単にできちゃいます。
これは慣れの問題で一度できるようになると難しくないのですが、活字で説明してもなかなか理解がし辛いでしょう。
今回は、上記の説明の難しさから、力の方向だけではなく左右の大転子の変位の増加方向(位置の変化)も各コマに追加して理解の一助となるように改良して解説します。
コマ図解説
接地及びその前後
1.接地直前
左脚(赤色)は僅かに後方保持でほぼ脱力、右脚(青色)は脚の振出しに引っ張ってもらって右大転子が前に移動している真っ最中。 脚のを重さを腰に感じながら引っ張ってもらいつつ右の骨盤を「前スライド」的に移動することで、ダンプ効果があり脛の振出の抑制もされるようです。 あくまで脚に引っ張ってもらうのが重要で、力を入れて自力で前に移動させるのは効率を落とすだけで効果がなくなります。
また、右の大転子が前に移動しながら左脚が接地を迎えることになるので、腰の回転により左の大転子には着地荷重へ備える後方への荷重受けができ効率よくトルクが伝わるという一石二鳥の効果があります。
")
2.接地の瞬間
左脚は脱力か、少し上方保持でごく弱いスイングをする程度で地面反力をしっかり受ける準備。右脚は前コマ同様に後方保持しつつ前方移動継続。
")
3. 最大着地荷重
左脚は最大荷重を受けるため下方向に荷重。右脚は前コマ同様に後方保持しつつ前方移動継続。
")
4. 最大荷重~着地荷重抜き
左脚は最大荷重を受けた後に早めに荷重抜き、大転子は前方から上方へ素早く回転させ吊る。右脚は前コマ同様に後方保持しつつ前方移動継続。
")
跳ね上げ~空中姿勢
5. 膝下の跳ね上げ誘導
左脚は荷重を抜いた後、膝を前方に保持して脛の跳ね上がりを誘導する。(上に力を入れて跳ね上げる必要は全くない)大転子は前方から上方へ素早く回転させ吊る。右脚は前コマ同様に後方保持しつつ前方移動継続。
")
6. 右脚の脛振出し抑制
左脚は脛の跳ね上がりを誘導しつつ、膝の前方移動のための準備。右脚は前コマ同様に後方保持しつつ前方移動継続で、脛が振り出されてくるので結果的に少し強めの後方荷重になる。
")
7. 右脚の脛振出し抑制
左脚、右脚とも、前コマ同様。
")
8. 左脚は前方にシザース開始
左脚は前方にシザース開始。左大転子を後方に抑えることで、左膝はすっと前へ出るとともに、左側骨盤を引っ張り始める。 右脚は前コマ同様だが接地準備に入る。
")
9. 左脚はシザース
左脚はシザースですっと前へ出て左側骨盤を前スライドさせつつ引っ張る。右脚は前コマ同様だが接地準備に入る。
")
10. 右脚は接地動作へ
左脚は前コマ同様だが右脚が接地動作のため脱力してゆくため、膝の前方移動は鈍る。
")
11. 以下、1コマ目の左右反対動作
")
まとめ
以上ですが、走法やフォームの説明って難しいですね。 このアニメとコマ図でもなかなか理解が難しいと思いますが、遊脚の振出しに引っ張られて大転子が穏やかに前方移動する感覚を一度得られれば、あえて逆ローリング走法や前スライド走法ではなくても、ご自身が走り慣れているフォームに組み合わせて走ることができるのではないかと思います。
私の方では、今後も更にブラッシュアップに努めてゆきたいと思います。
- 実体ファイル:inc/marathon/Neo逆ローリング走法
今年も買ってしまいました、雑誌付録スピーカーユニット。


今回も自作スピーカーコンテストが開催されるのですが、参加するにはこちらのフォステクス製の8cmユニットではなく、パイオニア製の6cmユニットを使う必要があります。
私は今シーズンはマラソンに注力するため、コンテストに応募しませんので、より音の良さそうなフォステクス製の方を買いました。
これでまた部屋が狭くなる。。という心配はご無用です。作らなければいいのですから。笑
まずは既存のクリアミントに付けて、FE83-solと音の違いの確認と行きますか。
ということで、いつものように8cm用エンクロージャ、クリアミントにマウントし音出しです。
コーンの材質が昨年のstereo誌付録と同じアルミなので、品位は多少向上している気がしますがアルミ質の高域には変わりありません。低音はよくでます。
ボーカルは残念ながらFE系の足元にも及びません。

付録ユニットOMF800P+クリアミントで再生した録音と、FE88-sol+トルネードフライで再生した録音を、2曲、同じ曲で比較のためそれぞれYoutubeにアップしました。
この比較だけ聞き比べると、OMF800Pも侮れないですね。 実際にはもっと差があるのですが、録音してYoutubeアップだと高域の品位の差が小さくなります。
能率に差があるので、録音レベルが同じになるように、OMF800Pの再生音量を上げています。 MoodeAudioのソフトボリウムで、OMF800Pで51、FE88-solで36程度とかなりの差があります。
選曲
1,Digifi-No22 GreenSlleves 32bit/384kHz
3,松岡直也 Fiesta Fiestaより Silver Night Fever
OMF800P+クリアミント
https://www.youtube.com/watch?v=0mNNscIuGCg
FE88-sol+トルネードフライ
https://www.youtube.com/watch?v=Y0jMhCZ-Izk
先日出張終了間際に、妻の業務用パソコン[FMV-MG50K]のバックライトが突然消えました。(子供がゲームで遊んでいる最中。笑)
バックライトの点灯しない液晶を目を凝らしながら操作して、古い[TP-X22]へメール・ブラウザ環境を移行し、昨日引取り修理となりました。 購入は昨年の4月ですから保障期間内ですが、こんなに早く故障すると心配ですねえ。
3月までの優遇税制を使って経費で高性能デスクトップPCをいっちょ買おうかと思ったのですが、マシンが増えればそれだけ手間も増えるし万一の故障の確率も上がる、と躊躇してます。 自分で自分の首を絞めないように・・
昨日の2017年stereo誌自作スピーカーコンテスト授賞式・試聴会の会場で12/19発売予定の書店より早く販売されていた、「極上の音質改善機器シリーズ」Pioneer製USB型ノイズクリーナー「APS-000T」を買ってきて試しています。4,600円。 今回発売される2機種には、USBジャックが付いておりスルー接続が可能となっています。

実は最近、あまり音楽を聴く気になれずアンプに火を入れることすら少なく、耳が元の音に慣れていません。 そんな中でこれをRaspberryPi3+のUSBポートに差してDDCのAmanero Combo 384の間に入れて試聴しているわけですが、そうしたエクスキューズを前提とした上で言えば、音質が向上していると感じています。
具体的にどこが変わったか?というと、ノイズフロアの低下、高域のフォーカス向上、音像周辺の空気感(?)。

まあこれは私の耳のプラシーボ効果もあるので、興味のある人は12/19以降に書店に立ち寄ってみて購入し、ご自身の耳で確認してくださいな。
