
今年のStereo誌2015年8月号付録ユニットもFostex、それも10cmのフルレンジ「P1000」です。
まあ、マグネットのサイズが市販のP1000Kのφ65mm→φ60mmにダウンしていることや、Qが0.8ということで、低域の質を落とさずにどうやってまとめるかがポイントでしょうね。
ということで、僕も買ってみました。
拙作のスター-SolのFE103-Solを外して、P1000をポン付けして鳴らしてみました。 逆ダブルバスレフのHi側(第二ダクト)の共振がいちいちポンポン耳障りですが、ここを絞るとLo側(第一スパイラルダクト)の量感も減ってしまいますので、この形式は止めたほうが良さそうです。
ならば、スパイラルなら前作のクリアミント式で1空気室+音響チャンバーということになるのですが、、塩ビ管だと大きくなりすぎるし木工は時間が足りない。。
とはいえ、低域の量感と中域のバランスはここ最近のFostex10cmユニットでは髄一では?と思わせるものがあります。 高域の伸びが今一つですが、そこはかえって(コンテストが終わった後に)ツイーター付加の余地があって僕としては歓迎です。
さて今年は、書類受付を9月末頃まで受けてくれるということで有難いのですが、どうするかな。


 2
2昨日F特測定したのですが、どうもRchの低域の伸びが今一つのようで、7年ぶりにインピーダンス測定にトライしてみました。
使用ソフトは、「ARTA」に付属の「LIMP」です。 「Myspeaker」でもインピーダンス測定は可能なのですが、アンプを介して行うため、バランス出力のアンプは使えなかったり、接触不良などで抵抗が外れたりするとPCのマイク入力が壊れたりするので、アンプを介さずに測定できる「LIMP」で今までも測定してきました。
- 参考にしたのは、当サイトのこちらの記事。 オヤさんのサイトがずいぶん前にクローズされてしまったのは痛かったですが、今なら他にも参考にできそうなサイトはググれば出てきますね。
- ARTAは、こちらからダウンロードできます。
- ケーブルの製作
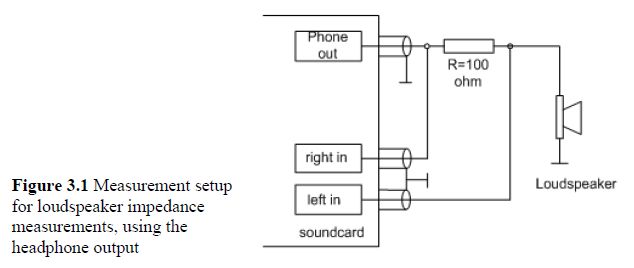
- サウンドデバイス出力を100Ωセメント抵抗を介してスピーカーに接続し、抵抗手前からダイレクトにマイクRch入力に。 抵抗のスピーカー側からマイクLchに入力します。
LIMPマニュアルの「Figure 3.1」 
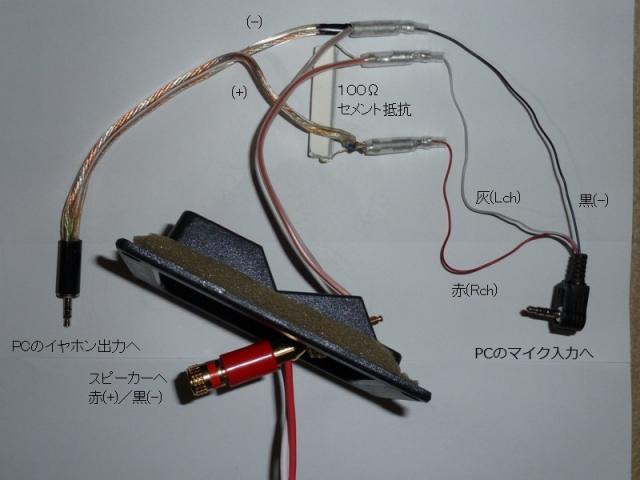
- 実際に製作したケーブル。 (手持ちにあったものを流用したので、配線太さがまちまちですが)
イヤホン出力プラグ側はモノラルでもOKですが、マイク入力プラグはステレオミニプラグが必要です。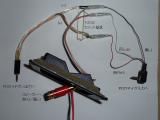
- サウンドデバイス出力を100Ωセメント抵抗を介してスピーカーに接続し、抵抗手前からダイレクトにマイクRch入力に。 抵抗のスピーカー側からマイクLchに入力します。
- LIMPの設定
- Setup / Audio Devices
製作したケーブルをイヤホン出力ジャック/マイク入力ジャックに差して、LIMPのメニューのSetup / Audio Devices で表示するウインドウ上で、使用するサウンドデバイスを選択します。
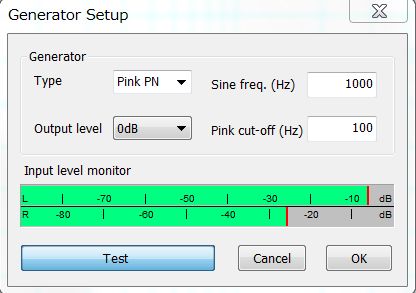
- Setup / Generator
スピーカーを接続し、LIMPのメニューのSetup / Generator で表示するウインドウ上で、「Test」を押すと、マイク入力レベルが表示されます。 出力レベル十分に高くしておくと、測定精度も高くなるそうです。
なお、この図のようにL側のレベルが高い場合は、L/Rが逆に接続されている可能性があります。 (その場合は、次の項目「Refference channel」を変更します。)
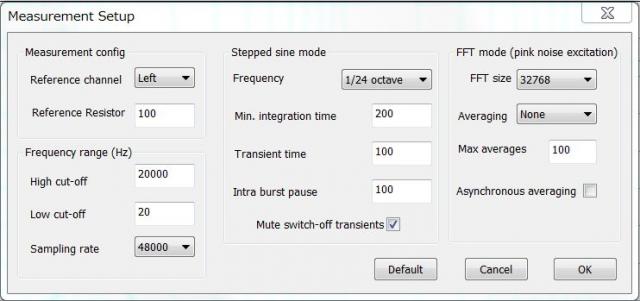
- Setup / Measurement
LIMPのメニューのSetup / Measurementで表示するウインドウ上で、Measurement config 内で 「Refference channel」の「Left / Right」 を正しく選択します。 どちらか迷う場合は、ひとまず測定してみておかしければ逆にしてみる、という手順で大丈夫。 平均化などは必要に応じて試してみるとよいでしょう。
- Setup / Audio Devices

- 測定
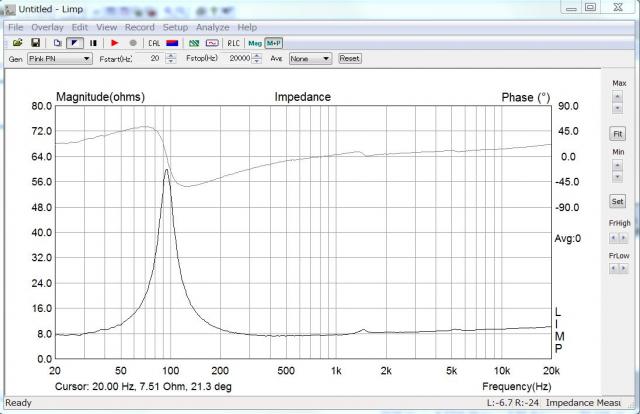
- LIMPのメニューの Record / Start か、アイコンの「Start Rec」を選択すると、測定を開始します。
- 測定結果は、例えば下図のように出ます。グラフ縦軸スケールなどは、必要に応じて調整します。
- File / Export As で、「Plain .ZMA」形式データを生成しておきます。
- Speaker Workshop へのインポート
ARTAやLIMPの測定結果は、上の図のように単独表示で確認するところまで可能です。 その先、測定結果データの重ね合わせや、シミュレーションなどは Speaker Workshop へインポートして行うとフレキシブルに活用できます。- ダウンロードはこちらから。
- 左側のプロジェクトペインで右クリックし、「Import」を選択して、LIMPで生成した「.ZMA」データをインポートします。
- 2つのデータを重ね合わせたい時は、夫々のZMAデータをImportした上で
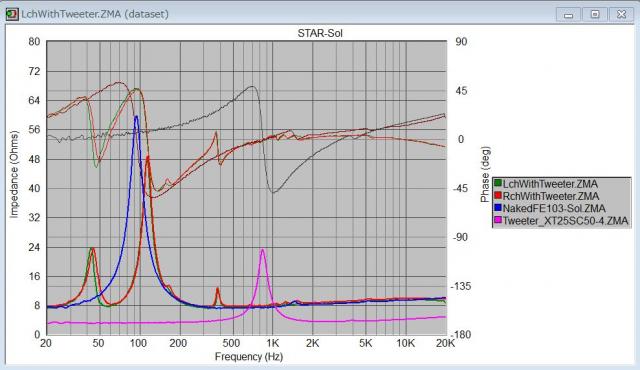
- スパイラルバスレフらしく、FsとF0'間の谷底の広さが広帯域の輻射(ロードがかかっている)状態を示しています。
- 400Hz付近に共振点があるようだけど、何かなあ。 第2空気室単独の共振? それとも気柱共鳴? 原因不明です。
- しかし予想通り、LchのFsが少し低いですね。 ダクトの捻りが強いかな。 修正しなくては・・
- Speaker Workshop は使いづらい面もあるのですが、慣れると本当に便利です。 これを機会に皆さんも始めてみてはいかがでしょう?
SRC-Cチーム時代の仲間から、有志の8/17~18の一泊二日の夏合宿にお誘いを受けて参加してきました。場所は静岡県の島田市、しまだ大井川マラソン大井川河川敷のリバティコースを走ります。
今回も渡れなかった、蓬莱橋 |
コロナ感染
実は7月末からの三重県出張の直前にここに宿泊して朝ランしてから移動したのですが、その時か移動先のホテルで今更ながらCoVid19コロナウイルスに感染・診断され、出張先で5日間も寝込んで高熱と喉の痛みと戦っていました。(ほとんど仕事できず終わってしまった。関係者の皆様、ご迷惑をおかけしました。) 
ランオフし寝込んでいたこともありますが、回復後の初日から出張先朝ランを短め距離から開始。しかし、呼吸器は気管支炎の空咳程度で後遺症もなかったものの、足の筋肉にダメージを感じます。体内の至る所でウイルスと戦っていたのだなあ、と感じます。 
その後は日々の走行距離を徐々に通常に戻してゆき、ペースも徐々に回復。合宿を迎える頃には、元に近い状態まで回復しました。
前置きが長くなりましたが以下、今回の日記には、参加されたメンバーの撮影された写真や文章を(私なりに編集し)掲載します。原作者のSさん、撮影された皆様、そしてモザイク無し写真の掲載をご快諾いただいた皆様、この場を借りて御礼申し上げます。 
トレーニング内容
- 1日目
- 夕方16時過ぎ開始、10kmジョギング、キロ6:00~6:30程度 +WS5本。
- 2日目
- 第一部:朝5時開始、5km Tペース~Mペース x2セット。気温を考慮しキロ5:00。
- 第二部:am9時半開始、スロージョグ 90分間(→暑すぎ60分に短縮)キロ6:30~7:00
→その後、蓬莱温泉で入浴、昼食を済ませて解散。
ランニング変態衆
今回、こんなクソ暑い盛りに、静岡の暑い河川敷で合宿をしよう、と言って集まるメンバーは立派な変態ランナーですね。しかしそれでも互いに変態と呼び合うことに喜びすら感じてしまう、5人の個性派メンバーが集合しました。Sさんによる皆さんのプロフィール紹介は以下のようです。
- 「合宿やりたい!」と言い出しっぺの変態、Kさん
- とにかくペースを淡々と刻む変態、Tさん
- いつも「無理無理・・」と言いつつなんだかんだ最後まで元気に一番走っちゃう変態、Nさん
- タダの変態(??いやいや、そんなわけないですがな!?)、Sさん
- コロナ明け変態、私。
 |
1日目
- GPSログ(Garmin)
- 8/17 合宿1日目。ジョグ10キロ+WS5本@エンドルフィンスピード4、普段走らない夕方、気温も高く喉がカラカラ。2L魔法瓶ボトルにドリンク作って持参し、休憩時に大量に補給で、どうにか完走。
WSは前を走る速い皆さんに吊られてスピードアップ、普段より30-60秒は速く走ったので、膝にきてないか少々心配でしたが大丈夫でした。


- タダ変態のS氏の日記によれば、夕方4時にも関わらず、気温は35℃あったそうな。それでも全員WS5本やりきるところが変態の証明。
そして、Nさんが車で来ていたので皆さんそちらに同乗するようですが、コロナ明け変態の私は高強度練習の後の血中Ph値が酸性の状態のまま帰りたくなかったため、ホテルまで1.5kmをジョギングで帰りましたところ、刻みペース変態さんも付いてこられたようです。これをみたタダ変態さんは私ら2人をまとめて「ド変態」と思っていただけたとか。光栄です! - 夜は近くの居酒屋で酒盛り、、ではなく懇親会。ビールで乾杯、翌日もあるので深酒こそしませんが、全員最後までアルコールだったのは立派ですっ!笑
 楽しい時を過ごしました。面白い話しが出るたび思いましたが、やっぱりみんな変態だぁ
楽しい時を過ごしました。面白い話しが出るたび思いましたが、やっぱりみんな変態だぁ


2日目
第1部:朝練
- GPSログ(Garmin)
- AM5時に集合し5kmペース走×2本@ハイパースピード2。
スロースターターの私は、1本目出だしユックリめで入り、皆に離されながら頑張って追っていきました。最後は4.56、結構頑張った。
2本目は最初から付いて行ったものの、後半少しキツくなり若干ペースダウンして復活、何とか走り切りました。 - タダ変態さんは、どうやらこの2本目に「この夏の練習のすべてを出し切る」という目標を掲げていたらしく、入りからキロ4:40ペース、徐々にビルドアップし、最後は4:15ペースまで上げたとか。。いやはやこれで自称タダの変態とおっしゃる意味がワカリマセンね。

- 練習終了後、コロナ明け変態、刻みペース変態さんとともに、タダ変態さんもホテルまで一緒にジョグしました。タダ変態さん、ド変態の血は隠せませんでした。

第2部:午前練
- GPSログ(Garmin)
- 9.30ホテルチェックアウト、スロージョグ90分の予定で。
- スタート前のタダ変態Sさん、朝練で疲れたようで(そりゃああの暑さの中でビルドアップすればね。。)朝練をモノともしていない様子の変態衆に「なに、この変態集団!もはや変態雑技団だわ!」と密かに思っていたそうです。
- 気温33℃でスタートし、日差しが容赦なく降り注ぎます。
そんな中、言い出しっぺ変態さんと無理無理変態さんが、リズム良く6:00〜6:30/kmペースを刻みます。おーい、この炎天下の中でそのペースはすごいです、ド変態がここにも2人。
コロナ明け変態の私は汗をびっちょりかきながら、体と相談しつつ6:50くらいのペースを刻みました。
刻みペース変態さんは、もはや周りにわき目も振らず、7:00/kmで自分の目標に向け、まっしぐらです。走り終えると、スタート地点に変態雑技団が全員しゃがみこんでいました。誰からともなく、「もういいかなあ」・・「60分で終わりにしましょう!」



練習が終わって
Nさんの車で、近くの蓬莱の湯で入浴と食事、生き返りました。皆さま、合宿前、合宿中に大変お世話になりました。変態雑技団は解散となりましたが、皆さんが変態であることは変わりません。来年もやりたいですね。時期と場所は要検討にて。
その後の練習経過
合宿が終わり、回復能力向上のために翌日から軽めに中/低強度走を再開、3日後には完全に回復しました。
- 今、マイブームは肩甲骨起点の腕振り改善から、キック直後の荷重のキレ、早めの前送り、逆脚荷重と遊脚下ろしのタイミング調整による遊脚慣性の回収利用、肩甲骨と逆脚お尻を結んだ線を背筋で一体化する意識で接地荷重。。等々、着実に改善が進んでいます。
最終目標は、こちらの稚内平和マラソンのナンバーカード202番、40歳台1位の浦木直人選手(ゴールタイム2時間40分切)のような脱力フォームです。 徐々にですが、これに向かって進めている感触があります。秋のレースシーズンに向けて維持向上に努めます。
(追記)
- 8月のラン記録
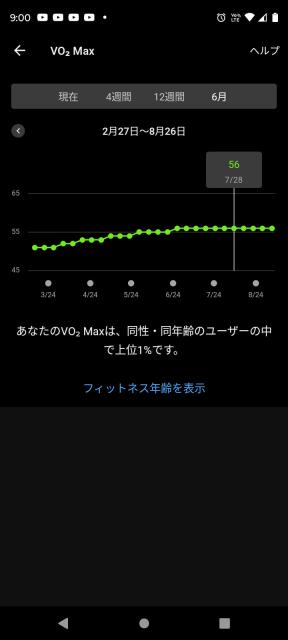
昨年は夏から秋口にかけて、GarminのVO2max値がだら下がりに下降しました。今年は春先からの中強度走とともに51から上昇してゆき、現在も56を維持できています。 中強度走、バンザイ!
少々残念な見解を見つけた。
マツダのSKYACTIV-Gガソリンエンジン、高圧縮比を達成していながら、最大トルクやパワーがそれほど大きくないのが不思議であったが、こういうことなのだと言われるとなるほど合点がゆく。
http://www.geocities.jp/bequemereise/skyactiv_g.html
要は、燃費が良いのはパーシャルスロットル(75%程度までか)の時であり、高負荷域では点火時期をTDC(上死点)より早めることができず、高圧縮比のポテンシャルを引き出しきれずに燃費が悪化する、ということと読んだ。
まあ、私の住むような田舎で定地走行の割合が多い走行条件では恩恵を授かることができるけど、加減速の激しい街中や、山越えなどではあまり燃費がよくない、というところだと認識した。 今週納車されたら、色々と試してみようと思うけど、難しい解析は無理なのであくまで感ジニア的な見方でやってみようと思う。
(追記)
上記の見解は、逆に見れば低負荷~70%程度までの中負荷に至るまでは、ミラーサイクルによる省燃費効果が大きく出ていて、 そこから更に踏み込むとミラーサイクルでは無くなり燃費は悪化する、 というごく普通のことなのかもしれないです。 改めて書くまでもなかったのかも。
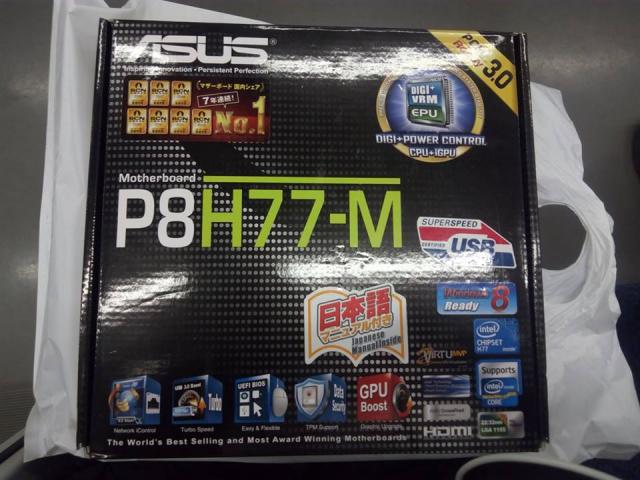
5年間、安定稼働を続けていた、我が家のVMware ESXi 仮想化サーバー。 ところが去る2月15日に、マザーボードが突然死。 
2日後に、中古で暫定版のマザーボードをどうにか探して買ってきて、何とか立ち上げました。

しかしその後、1週間に数回ほどサーバーが落ちる現象の原因がわからず。 単身赴任先から自宅に連絡して、家族にリセットしてもらっていました。
しかしこんなことを続けているわけにもいかないので、今後は構成を一気にシュリンクして、オーディオプレイヤーとしても使っているワンボードコンピューター、RaspberryPi3 へ移行することを決めました。断捨離です。
有難いことに、このサーバーで稼働中の、集まれ!塩ビ管スピーカーの経費でハード費用を支出いただけることとなり、1万円に収まる金額ですが有効に活用させていただくことにして、現在移行作業中です。どうもありがとうございます。
既に、なーお'nWEBと集まれ!塩ビ管スピーカーのWEBサイトは移行済み。WEBサーバーはApacheではなく軽量高速なnginx。 それでもハードのスペックが低いため、少しレスポンスが遅いですがどうぞご容赦を。 他のアーカイブサイトも今日中に移行完了の見込みです。 その後、メールサーバー移転に着手・・
それにしても、いくつものXOOPS Cubeサイトを動かしてしまうRasPiサーバー、恐るべき実力ですね。
(追伸)
運用開始後、サーバーダウンが頻発。再起動しても立ち上がらない。
php-fpmのログを見ると、
WARNING: [pool www] server reached pm.max_children setting (5), consider raising it
これは、子プロセスの設定がうまく行っていないということらしい。
参考:php-fpmのエラーにぶつかりながら設定の最適化を図る
/etc/php/7.0/fpm/pool.d/www.conf
; pm.max_children = 5 pm.max_children = 20 ; pm.start_servers = 2 pm.start_servers = 4 pm.min_spare_servers = 2 ; pm.max_spare_servers = 3 pm.max_spare_servers = 6
これで安定してくれることを願います。。
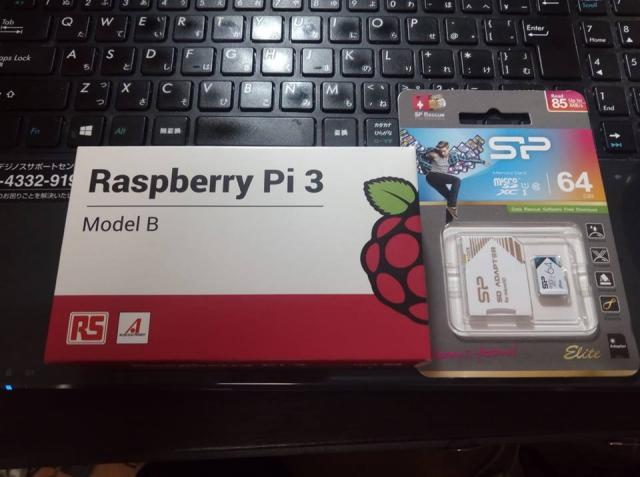

RaspberryPi3 B type (RS components製)と,
64GbyteのSDXCメモリ、積層式のCase。なかなか面白い。ファンも付いてきたけどまだ付けていない
Rasbian稼働中・・
...
5月の日記で、緑基板のDACの出力部分の改造をして、満足のゆく音が得られていました。
ただ、Raspberry Piでオーディオしま専科 グループの改造作者の方は、黄色基板の改造で実施しています。
実は、黄色基板も2枚ほど買ってあって、在庫していました。 1枚1,000円ほどですんで、これでよい音が出ればすばらしいです。
改造前は、緑基盤の時と同様にざらついた感じでしたが、改造後は滑らかさが出ていい感じです。 緑基盤との比較では、高域が少し押しが強く、低域は伸びを抑えてキレが良い方向です。
好みは分かれるところだと思いますが、現段階ではこの黄色基盤のほうが音がフレッシュで良いですね。 1個千円程度で買えるので、改造費がその半分くらい上乗せでかかりますが、それでもコスパは最高。
なお、Raspberry Piでオーディオしま専科 グループの後藤さんの改造個所に倣っていますが、コンデンサメーカーが違ったり、タイプが違ったり、容量が少し違ったり、一部取り付け位置がわからず付けていないものがあったりしています。 完全にコピーすればきっともっと良い音になると思うのですが、これ以上良い音になってもスピーカーがボトルネックで違いがわからないと思います。
なお、出力RCAジャック手前の抵抗は560Ω、ポリエステルフィルムコンデンサは2700pFです。
1曲、ソフィーミルマンの曲を録音してみました。
https://www.youtube.com/watch?v=1C5nk9GqbYg
また中途半端な状態ですが、私はこの時点ですでに満足しています。 ありがとうございます!
オリジナルの投稿
https://www.facebook.com/groups/rasp.audio/permalink/481413312052018/

ES9023 黄色ボード改造版の表
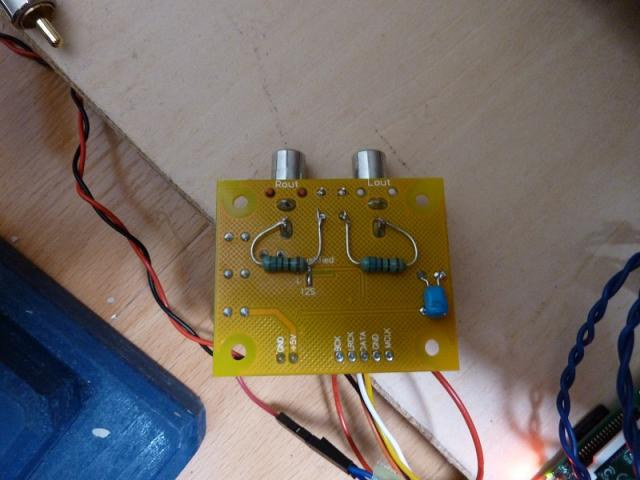
ES9023 黄色ボード改造版の裏
昨日の2017年stereo誌自作スピーカーコンテスト授賞式・試聴会の会場で12/19発売予定の書店より早く販売されていた、「極上の音質改善機器シリーズ」Pioneer製USB型ノイズクリーナー「APS-000T」を買ってきて試しています。4,600円。 今回発売される2機種には、USBジャックが付いておりスルー接続が可能となっています。

実は最近、あまり音楽を聴く気になれずアンプに火を入れることすら少なく、耳が元の音に慣れていません。 そんな中でこれをRaspberryPi3+のUSBポートに差してDDCのAmanero Combo 384の間に入れて試聴しているわけですが、そうしたエクスキューズを前提とした上で言えば、音質が向上していると感じています。
具体的にどこが変わったか?というと、ノイズフロアの低下、高域のフォーカス向上、音像周辺の空気感(?)。

まあこれは私の耳のプラシーボ効果もあるので、興味のある人は12/19以降に書店に立ち寄ってみて購入し、ご自身の耳で確認してくださいな。
先日出張終了間際に、妻の業務用パソコン[FMV-MG50K]のバックライトが突然消えました。(子供がゲームで遊んでいる最中。笑)
バックライトの点灯しない液晶を目を凝らしながら操作して、古い[TP-X22]へメール・ブラウザ環境を移行し、昨日引取り修理となりました。 購入は昨年の4月ですから保障期間内ですが、こんなに早く故障すると心配ですねえ。
3月までの優遇税制を使って経費で高性能デスクトップPCをいっちょ買おうかと思ったのですが、マシンが増えればそれだけ手間も増えるし万一の故障の確率も上がる、と躊躇してます。 自分で自分の首を絞めないように・・
今年も買ってしまいました、雑誌付録スピーカーユニット。


今回も自作スピーカーコンテストが開催されるのですが、参加するにはこちらのフォステクス製の8cmユニットではなく、パイオニア製の6cmユニットを使う必要があります。
私は今シーズンはマラソンに注力するため、コンテストに応募しませんので、より音の良さそうなフォステクス製の方を買いました。
これでまた部屋が狭くなる。。という心配はご無用です。作らなければいいのですから。笑
まずは既存のクリアミントに付けて、FE83-solと音の違いの確認と行きますか。
ということで、いつものように8cm用エンクロージャ、クリアミントにマウントし音出しです。
コーンの材質が昨年のstereo誌付録と同じアルミなので、品位は多少向上している気がしますがアルミ質の高域には変わりありません。低音はよくでます。
ボーカルは残念ながらFE系の足元にも及びません。

付録ユニットOMF800P+クリアミントで再生した録音と、FE88-sol+トルネードフライで再生した録音を、2曲、同じ曲で比較のためそれぞれYoutubeにアップしました。
この比較だけ聞き比べると、OMF800Pも侮れないですね。 実際にはもっと差があるのですが、録音してYoutubeアップだと高域の品位の差が小さくなります。
能率に差があるので、録音レベルが同じになるように、OMF800Pの再生音量を上げています。 MoodeAudioのソフトボリウムで、OMF800Pで51、FE88-solで36程度とかなりの差があります。
選曲
1,Digifi-No22 GreenSlleves 32bit/384kHz
3,松岡直也 Fiesta Fiestaより Silver Night Fever
OMF800P+クリアミント
https://www.youtube.com/watch?v=0mNNscIuGCg
FE88-sol+トルネードフライ
https://www.youtube.com/watch?v=Y0jMhCZ-Izk
(2019-12-22 まとめページと同じ内容に変更しました。内容も少しだけ加筆しています。)
本ページ記載の内容は、現在はこのままでは非推奨となります。筆者はこの動きと素の逆ローリング走法を合わせた動きを意識して走っています。
2017年の夏ごろから始めた、大転子ランニング指向によるランニング走法の研究。 下のブログ一覧のように2年半の歳月をかけて色々と回り道しながら、ようやく自分に合った効率の良い走法:Neo逆ローリング走法にたどり着きました。
当サイトランニング走法関連ブログ 
- 2019-11-17 Neo逆ローリング走法
- 2019-9-23 ズームフライ+フォアフット走法と逆ローリング走法のマッチング
- 2019-9-01 続:ランニングフォームの探究 3
- 2019-8-18 続:ランニングフォームの探究 2
- 2019-6-30 続:ランニングフォームの探究
- 2018-6-2 ランニングフォームの探究
- 2017-9-18 辛い練習はしなくても目標タイム達成可能?
- 2017-8-19 接地荷重時間を短縮するために
- 2017-7-22 大転子ランニング指向
Neo逆ローリング走法の特徴とコツ
2019年11月10日(日)完走の第33回 成田POPランで試した、素の逆ローリング走法のエコノミー改良版です。 仮称→「Neo逆ローリング走法」と名付けてみました。
")
素の逆ローリング走法の特徴は、遊脚を後方へ脱力スイングさせて接地を迎えることで、膝への負担を減らすことでした。しかしその為にはある程度の後方へのスイング速度が必要で、準備段階で脛が前方へ振り出し気味になってしまうため、それを補う動作によってエコノミーがやや低下していました。
今回のNeo逆ローリング走法では、この遊脚の後方への脱力スイングを封印し、より穏やかに接地を迎えることが可能になっているので、フォアフットとの相性もバッチリです。 ポイントは、接地前にシザースで前に出ようとする脚に骨盤(大転子)を引っ張ってもらう感じにすることで、骨盤を後方力で保持しつつ少しづつ前方に穏やかに移動させて、脛を前方に投げ出すことなく足が無理なく重心付近に降りてくるようにすることです。結果的に直後の脚の後方へのスイング速度は下がります。
遊脚の重さを腰に感じながら、骨盤(大転子)を「後方に保持し」、位置的には脚に引っ張られて「徐々に前方に移動」させる。力学的には、前に出ようとする脛の慣性エネルギーを骨盤の移動で吸収する形ですので、結果的に無理なく無駄なく効率的に骨盤が前に出るのです。
みやすのんき氏の膝下だけ「前スライド」の意識からの速度アップのコツとしても有効だと思います。言ってみれば、骨盤・大転子を「前スライド」させるイメージでしょうか。 でも骨盤を自力で前にひねるわけではなく、あくまで脚に引っ張ってもらうわけなので、「腰を前に!」とか「骨盤前傾!」なども無理に意識することなく、割と簡単にできちゃいます。
これは慣れの問題で一度できるようになると難しくないのですが、活字で説明してもなかなか理解がし辛いでしょう。
今回は、上記の説明の難しさから、力の方向だけではなく左右の大転子の変位の増加方向(位置の変化)も各コマに追加して理解の一助となるように改良して解説します。
コマ図解説
接地及びその前後
1.接地直前
左脚(赤色)は僅かに後方保持でほぼ脱力、右脚(青色)は脚の振出しに引っ張ってもらって右大転子が前に移動している真っ最中。 脚のを重さを腰に感じながら引っ張ってもらいつつ右の骨盤を「前スライド」的に移動することで、ダンプ効果があり脛の振出の抑制もされるようです。 あくまで脚に引っ張ってもらうのが重要で、力を入れて自力で前に移動させるのは効率を落とすだけで効果がなくなります。
また、右の大転子が前に移動しながら左脚が接地を迎えることになるので、腰の回転により左の大転子には着地荷重へ備える後方への荷重受けができ効率よくトルクが伝わるという一石二鳥の効果があります。
")
2.接地の瞬間
左脚は脱力か、少し上方保持でごく弱いスイングをする程度で地面反力をしっかり受ける準備。右脚は前コマ同様に後方保持しつつ前方移動継続。
")
3. 最大着地荷重
左脚は最大荷重を受けるため下方向に荷重。右脚は前コマ同様に後方保持しつつ前方移動継続。
")
4. 最大荷重~着地荷重抜き
左脚は最大荷重を受けた後に早めに荷重抜き、大転子は前方から上方へ素早く回転させ吊る。右脚は前コマ同様に後方保持しつつ前方移動継続。
")
跳ね上げ~空中姿勢
5. 膝下の跳ね上げ誘導
左脚は荷重を抜いた後、膝を前方に保持して脛の跳ね上がりを誘導する。(上に力を入れて跳ね上げる必要は全くない)大転子は前方から上方へ素早く回転させ吊る。右脚は前コマ同様に後方保持しつつ前方移動継続。
")
6. 右脚の脛振出し抑制
左脚は脛の跳ね上がりを誘導しつつ、膝の前方移動のための準備。右脚は前コマ同様に後方保持しつつ前方移動継続で、脛が振り出されてくるので結果的に少し強めの後方荷重になる。
")
7. 右脚の脛振出し抑制
左脚、右脚とも、前コマ同様。
")
8. 左脚は前方にシザース開始
左脚は前方にシザース開始。左大転子を後方に抑えることで、左膝はすっと前へ出るとともに、左側骨盤を引っ張り始める。 右脚は前コマ同様だが接地準備に入る。
")
9. 左脚はシザース
左脚はシザースですっと前へ出て左側骨盤を前スライドさせつつ引っ張る。右脚は前コマ同様だが接地準備に入る。
")
10. 右脚は接地動作へ
左脚は前コマ同様だが右脚が接地動作のため脱力してゆくため、膝の前方移動は鈍る。
")
11. 以下、1コマ目の左右反対動作
")
まとめ
以上ですが、走法やフォームの説明って難しいですね。 このアニメとコマ図でもなかなか理解が難しいと思いますが、遊脚の振出しに引っ張られて大転子が穏やかに前方移動する感覚を一度得られれば、あえて逆ローリング走法や前スライド走法ではなくても、ご自身が走り慣れているフォームに組み合わせて走ることができるのではないかと思います。
私の方では、今後も更にブラッシュアップに努めてゆきたいと思います。
- 実体ファイル:inc/marathon/Neo逆ローリング走法




