日記一覧
当サイトに登録されている日記一覧



先日出張終了間際に、妻の業務用パソコン[FMV-MG50K]のバックライトが突然消えました。(子供がゲームで遊んでいる最中。笑)
バックライトの点灯しない液晶を目を凝らしながら操作して、古い[TP-X22]へメール・ブラウザ環境を移行し、昨日引取り修理となりました。 購入は昨年の4月ですから保障期間内ですが、こんなに早く故障すると心配ですねえ。
3月までの優遇税制を使って経費で高性能デスクトップPCをいっちょ買おうかと思ったのですが、マシンが増えればそれだけ手間も増えるし万一の故障の確率も上がる、と躊躇してます。 自分で自分の首を絞めないように・・
最近遅ればせながら使い始めたPukiWiki。
で、「こんな機能があったら便利なのになあ、何で無いの?」 と思っていた物。 「ページ名エイリアス」。
それが、なんと今使っている「XOOPS+PukiWikiMod」で実装されていました! もぅ涙ものです。 ページ名エイリアス(別名)の導入 (XOOPSマニア)
...
仕事で、めずらしく制御盤の図面を書いた。
テスト盤ということで急ぐくせにコストをかけられないので、止む無くAutoCAD-LTを使って。
まあ、実績のある図面からほとんど拝借したのだが、元々電気屋ではない自分は図面は読むものであって書く機会はほとんどなく、1面分全て自分で書いたのは初めて。
今日はその出荷前検査を行い、ユニバーサルモデルのモーション制御のACサーボモーターをJOG運転まで実施し、引き取ってきた。 明日は客先工場へ持ち込んで、配線工事を立会い。 来週には不具合なく引渡しの予定。
たまには自分で図面を書かないと勘が鈍るから、今回の案件はちょうど良かった。 
")
|
出張の折に、FE103Eとツイーターを買ってきました。
そんでもって、こんな風にsubakoに仮付けして音出しです。
(撮影時はまだでしたが、実際にはネジ止めしてます)
口径が10cmにアップしただけあって、88ES-Rよりも低音がポーンと出てくる感じがします。スピード感もそこそこありますし、量感も伸びも(35Hzも)ちゃんと出てますし。 (一方で若干低域の歪感は増えたようです。)
ただ、やはり中域?中高域のプレゼンスは88ES-Rに適いません。 高域にちょこっとツイーターを追加してみても、 クロスを低くしてみても (これはツイーターのクオリティの問題もありますが)、 改善しませんねー。 88ES-Rのクオリティーの高さを改めて思い知りました。
低域の感じはバランスが良いので、全体の纏まりとしてはとても好みの音です。 そういう意味ではFE103Eは1set持ってるとReference的に使えそうです。
中高域の件はしばらくはエージングに期待して鳴らしこんでみます。 意外に厚かったコーン紙が良い感じにほぐれてくるのはいつになるか・・
良くできたマルチウエイは88ES-Rのsubakoよりもっと透明感の高い音がするし、このレベルではもし本選に通っても入賞は無理ですなあ。。 まあいっか。 スパイラル用の標準箱を作ると割り切れば。。 でもやはり面白みが足りないなあ。
 4
4Fostexより、2月から限定3,000台でFE88-Solが販売される、との情報が入りました。

フレームやマグネットサイズなどは、2004年に限定販売された高音質ユニット、FE88ES-Rと同じようですが、昨年発売のFE83-Solの癖の少ない高域を昇華させているとすれば、88ES-Rの尖った高域が今一つと感じていた私の耳にも優しい音質ではないかと思われます。
FE83-Solの音を気に入っているので、これに88ES-R同様の低域や押し出し感がプラスするとなれば、税抜き12,000円/本 も高いと感じません。 迷わずコイズミ無線でFE83-Sol購入時のクーポンを使ってポチりました。
最初にどのスピーカーで試そうか、、今年は仕事もマラソンも予定が詰まっていて、なかなか専用箱を設計製作する時間は取れそうにありません。 相性的にも正しい評価をする上でもトルネードフライにマウントするのが良いと思われ、CAD図をモディファイしてみました。
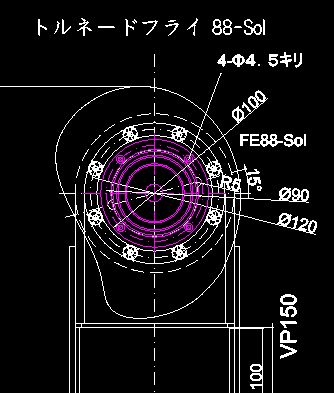
いやー、かなり楽しみです。
今年の塩ビ管スピーカーオフ会への参加が仕事の都合で危ういのですが、きちんと鳴ることが確認できれば、このトルネードフライ 88-Sol スピーカーだけの参加もアリかもしれません。
(2019-12-22 まとめページと同じ内容に変更しました。内容も少しだけ加筆しています。)
本ページ記載の内容は、現在はこのままでは非推奨となります。筆者はこの動きと素の逆ローリング走法を合わせた動きを意識して走っています。
2017年の夏ごろから始めた、大転子ランニング指向によるランニング走法の研究。 下のブログ一覧のように2年半の歳月をかけて色々と回り道しながら、ようやく自分に合った効率の良い走法:Neo逆ローリング走法にたどり着きました。
当サイトランニング走法関連ブログ 
- 2019-11-17 Neo逆ローリング走法
- 2019-9-23 ズームフライ+フォアフット走法と逆ローリング走法のマッチング
- 2019-9-01 続:ランニングフォームの探究 3
- 2019-8-18 続:ランニングフォームの探究 2
- 2019-6-30 続:ランニングフォームの探究
- 2018-6-2 ランニングフォームの探究
- 2017-9-18 辛い練習はしなくても目標タイム達成可能?
- 2017-8-19 接地荷重時間を短縮するために
- 2017-7-22 大転子ランニング指向
Neo逆ローリング走法の特徴とコツ
2019年11月10日(日)完走の第33回 成田POPランで試した、素の逆ローリング走法のエコノミー改良版です。 仮称→「Neo逆ローリング走法」と名付けてみました。
")
素の逆ローリング走法の特徴は、遊脚を後方へ脱力スイングさせて接地を迎えることで、膝への負担を減らすことでした。しかしその為にはある程度の後方へのスイング速度が必要で、準備段階で脛が前方へ振り出し気味になってしまうため、それを補う動作によってエコノミーがやや低下していました。
今回のNeo逆ローリング走法では、この遊脚の後方への脱力スイングを封印し、より穏やかに接地を迎えることが可能になっているので、フォアフットとの相性もバッチリです。 ポイントは、接地前にシザースで前に出ようとする脚に骨盤(大転子)を引っ張ってもらう感じにすることで、骨盤を後方力で保持しつつ少しづつ前方に穏やかに移動させて、脛を前方に投げ出すことなく足が無理なく重心付近に降りてくるようにすることです。結果的に直後の脚の後方へのスイング速度は下がります。
遊脚の重さを腰に感じながら、骨盤(大転子)を「後方に保持し」、位置的には脚に引っ張られて「徐々に前方に移動」させる。力学的には、前に出ようとする脛の慣性エネルギーを骨盤の移動で吸収する形ですので、結果的に無理なく無駄なく効率的に骨盤が前に出るのです。
みやすのんき氏の膝下だけ「前スライド」の意識からの速度アップのコツとしても有効だと思います。言ってみれば、骨盤・大転子を「前スライド」させるイメージでしょうか。 でも骨盤を自力で前にひねるわけではなく、あくまで脚に引っ張ってもらうわけなので、「腰を前に!」とか「骨盤前傾!」なども無理に意識することなく、割と簡単にできちゃいます。
これは慣れの問題で一度できるようになると難しくないのですが、活字で説明してもなかなか理解がし辛いでしょう。
今回は、上記の説明の難しさから、力の方向だけではなく左右の大転子の変位の増加方向(位置の変化)も各コマに追加して理解の一助となるように改良して解説します。
コマ図解説
接地及びその前後
1.接地直前
左脚(赤色)は僅かに後方保持でほぼ脱力、右脚(青色)は脚の振出しに引っ張ってもらって右大転子が前に移動している真っ最中。 脚のを重さを腰に感じながら引っ張ってもらいつつ右の骨盤を「前スライド」的に移動することで、ダンプ効果があり脛の振出の抑制もされるようです。 あくまで脚に引っ張ってもらうのが重要で、力を入れて自力で前に移動させるのは効率を落とすだけで効果がなくなります。
また、右の大転子が前に移動しながら左脚が接地を迎えることになるので、腰の回転により左の大転子には着地荷重へ備える後方への荷重受けができ効率よくトルクが伝わるという一石二鳥の効果があります。
")
2.接地の瞬間
左脚は脱力か、少し上方保持でごく弱いスイングをする程度で地面反力をしっかり受ける準備。右脚は前コマ同様に後方保持しつつ前方移動継続。
")
3. 最大着地荷重
左脚は最大荷重を受けるため下方向に荷重。右脚は前コマ同様に後方保持しつつ前方移動継続。
")
4. 最大荷重~着地荷重抜き
左脚は最大荷重を受けた後に早めに荷重抜き、大転子は前方から上方へ素早く回転させ吊る。右脚は前コマ同様に後方保持しつつ前方移動継続。
")
跳ね上げ~空中姿勢
5. 膝下の跳ね上げ誘導
左脚は荷重を抜いた後、膝を前方に保持して脛の跳ね上がりを誘導する。(上に力を入れて跳ね上げる必要は全くない)大転子は前方から上方へ素早く回転させ吊る。右脚は前コマ同様に後方保持しつつ前方移動継続。
")
6. 右脚の脛振出し抑制
左脚は脛の跳ね上がりを誘導しつつ、膝の前方移動のための準備。右脚は前コマ同様に後方保持しつつ前方移動継続で、脛が振り出されてくるので結果的に少し強めの後方荷重になる。
")
7. 右脚の脛振出し抑制
左脚、右脚とも、前コマ同様。
")
8. 左脚は前方にシザース開始
左脚は前方にシザース開始。左大転子を後方に抑えることで、左膝はすっと前へ出るとともに、左側骨盤を引っ張り始める。 右脚は前コマ同様だが接地準備に入る。
")
9. 左脚はシザース
左脚はシザースですっと前へ出て左側骨盤を前スライドさせつつ引っ張る。右脚は前コマ同様だが接地準備に入る。
")
10. 右脚は接地動作へ
左脚は前コマ同様だが右脚が接地動作のため脱力してゆくため、膝の前方移動は鈍る。
")
11. 以下、1コマ目の左右反対動作
")
まとめ
以上ですが、走法やフォームの説明って難しいですね。 このアニメとコマ図でもなかなか理解が難しいと思いますが、遊脚の振出しに引っ張られて大転子が穏やかに前方移動する感覚を一度得られれば、あえて逆ローリング走法や前スライド走法ではなくても、ご自身が走り慣れているフォームに組み合わせて走ることができるのではないかと思います。
私の方では、今後も更にブラッシュアップに努めてゆきたいと思います。
- 実体ファイル:inc/marathon/Neo逆ローリング走法
昨年に引き続き、行ってきました、兵庫県神鍋高原の民宿「陽喜」さんの「でこぼこオーディオ試聴会」
昨年は経費削減のために夜行バスで移動したのですが、あまり良く寝れなくて会場で眠かった記憶があり、ならば自分で車を運転して行っても同じではないか! ということで運転して行くことに。
東名を始め主な高速道路は土日及び夜間割引があり、割高になる交通費を少しでも削減するには有難い。 そして、愛車のLAFESTA Highway Starは穏やかな乗り味と正確でスムーズなハンドリング、燃費も期待できるので、夜間のドライブも楽しく行けました。
最初に燃費のほうを書いてしまうと、復路途中のSAで、往路含めた燃費。満タン50.99L入って978.6km走ったから、何と19.19km/L。高速ノンビリドライブとはいえ、JC08モード16.2km/Lの15%増しは、ビックリ! 排気量2Lの1.5トンもあるミニバンとは思えない。
2枚目は自宅に到着時点。給油後450キロ走ってメーター読み21.1km/L、出だしの下りの貯金で稼いだ。
ということで、期待を上回る燃費でした。 高速代のほうが倍以上高いんだけどね。。


車の話題はこのくらいにして、オーディオの話ですね、ハイ。
12日夜10時に出発、途中仮眠を入れて、13日(土)朝9時に民宿「陽喜」到着。民宿の前にはすがすがしい景色が広がります。


でこぼこオーディオ試聴会の会場。早速クリアミントを置かせていただく。 それにしても、これだけ揃えるのも並べるのも大変、そして何よりアンプやスピーカーのスイッチャーをマイコン制御で自作されており、瞬時に切り替えて比較視聴できるのがすばらしいです。 その熱意に本当に頭が下がります。


音の寸評ですが、高価なマグネシウム振動板ユニットをしっかり料理されているkenbeさんはさすがワイドレンジです。2度目の試聴となるこの会場でも歪の少ない音でしっかり鳴ってました。
SEASの高級ユニットをまとめたハリーさんの作品は、某ショップ京都店のあのお方に設計を依頼した24db/Octネットワークを装備しており、位相のブレを全く感じない奥行きのある音が印象的でした。ツイーターの音質がわたし好みで一番良かったですし、楽器やボーカルの音の肉付けがすばらしく色気があり、ずっと聞いていたいと思いました。
改造ユニット+コンクリートエンクロージャの遊音工房さんのスピーカーは、ユニット改造の効果か音の良さは感じますが、釈迦に説法ですがクロス付近の位相回転の処理がまだまとまっていない印象で調整途上とお見受けし、今後に期待します。 今や私のようなアマチュアでもユニット単体測定+シミュレーションでインピーダンスや位相関係の改善も含めてネットワークを組む時代ですから大変でしょうがどうぞ頑張ってください。
私の作品も含めて他の小口径スピーカーもそれなりにしっかり鳴っていたと思います。
近くの温泉に入って夕食を外で食べたあと、お楽しみの酒盛り+歓談です。 お酒が入るとオーディオ話に花が咲きますね。
夜の部で酒盛りが始まってしばらくした頃、ちょっと音量オーバーで高価なユニットが飛ぶんじゃないか? というハラハラな一面もありました。 もし飛んだらどうなるのか、次回からは曖昧にしないほうが良さそうに思います。
前後しますが、お昼は、別のお客さんに便乗させていただき、小峠を越えた蕎麦屋さん「床瀬そば」で美味しい本格的な手打ちそばをいただきました。

2日めの昼前に会場を後にして、大阪の「下手の横好き」さんのご自宅にお邪魔させていただきました。 この写真の38cmウーハーシステムや、そのほか計5セットも聴かせていただき、高音質なソースとシステムで聴かせていただきました。
メインスピーカーの巨大な4wayシステムは最後に聴いたのですが、PA用ウーハーの軽い低域は圧迫感が無くて私でも大丈夫でした。(重いドローンとして低域は気持ち悪くなります) そしてFE168EΣをフルレンジで使ったミッドレンジに、ツイーター+スーパーツイーターを付加した構成は、日頃小口径フルレンジをメインで聴いている私にはいつもの音の延長線上に位置した高音質な音で、とても安心感を持って聞くことができました。
(私のスピーカーも聴いていただいたのですが、お褒めの言葉をいただいたものの実際はどうだったのかと少々気にはなりますね。)

まずは左右一体型のヘキサゴン。 モノラルのようにしっかり中央に定位しますが、純モノラルとは違いスピーカーの上のぽっと音が浮かんでいる感じで、読書中のBGMに最適なスピーカーだと思いました。
続いて2012年stereo誌付録のSCANの10cmユニットのスピーカーです。 4ダクトマルチのダブルバスレフで、共振点が8つあり、低域がぽんぽん出てきますし、最低域も30Hzまでしっかり伸びています。 聞けば第一キャビダウトより第二キャビダクトのほうを高い周波数の逆ダブルバスレフとのこと、納得です。 相変わらずこのユニットはフルレンジとしては低域から中高域まで歪が少ないですね。


3番目はウーハーにsbアコースティック15センチを使った2Wayです。このくらいの口径のボーカルは下のほうがふくよかで聴きやすいですね。
最後はこちら、長岡鉄男氏のヒドラのようなスピーカーです。 直接音より関節音を聴かせてくれます。 ホールのような音場感を期待しましたが、もっとライブな部屋で聴けばそんな効果も期待できる気がします。


下手の横好きさんとのオーディオ話も楽しくて、気づけば4時間もお邪魔してしまいました。 本当にありがとうございました。
帰り道、土田SAで近江牛のシチュー。 トロトロで美味しかった。

こうして私の一人小旅行は終わりです。 月曜日は事前に年休を申請していて休み、明日から仕事に復帰します。
昨年は直前の不幸な事故でただただ辛かった、湘南国際マラソンを今年も完走してきました。
- 今年のゴールゲートは、少し風変わり。昨年はCブロックでしたが、今年はしっかりBブロックでエントリー。気温も低めで風も弱く、記録を狙うには絶好のコンディション。




自己ベスト狙いが、なんと! 従来ベストの佐倉マラソンから約6分短縮。二年越しで達成できなかった、サブ3.5が、肩の力を抜いて臨んだらできてしまいました。
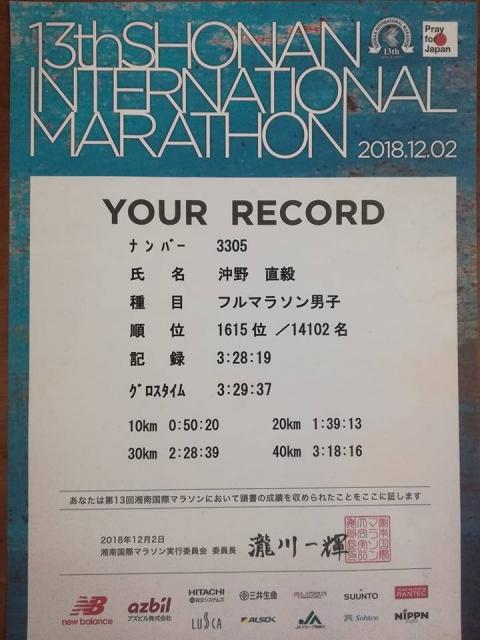
- グロス3:29:37
- ネット3:28:19
ネガティブスプリットの気持ちで、楽なペースから少しだけ追い込み気味に走っていたら、江の島折り返し後に3.5の最終ぺーサー集団に思いがけず追い付いてしまったので、しばらくの間その中で我慢して風を除けながらキロ5分程度で休みつつ走っていました。
30キロ付近からだんだん息が辛くなってきましたが、グロスタイムで間に合いそうになかったので37キロ付近から頑張って前に出て走りきりました。
結果的には完全なネガティブスプリットにはなっていませんが、その気持ちで抑えたから終盤までイーブンペースで走れたのだと思いますし、最後はいつものようにゼーゼーハーハー言いつつ、でもラスト2キロを4分40秒前半で押しきれたのは大きな収穫でした。
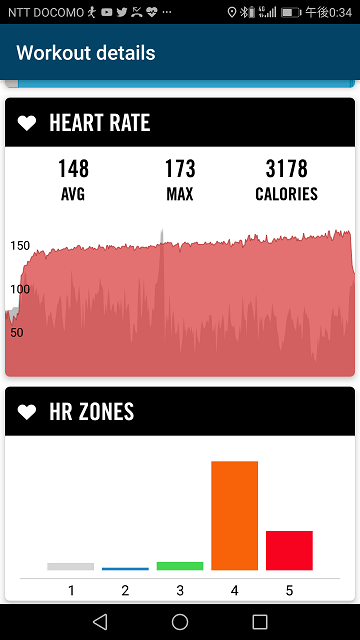
- 最後は完全に最大心拍数に振り切れました

- 1615位/14102人完走男子
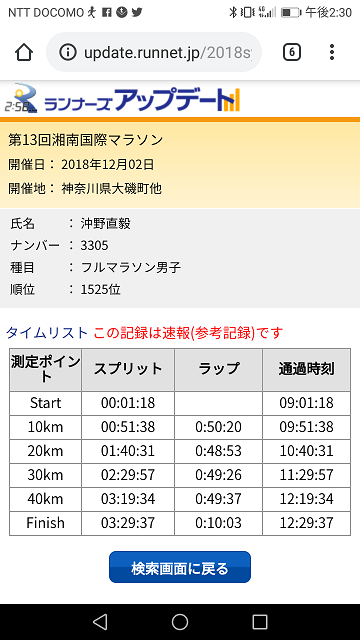
タイムリスト この記録は速報(参考記録)です
| 測定ポイント | スプリット | ラップ | 通過時刻 |
|---|---|---|---|
| Start | 00:01:18 | 09:01:18 | |
| 10km | 00:51:38 | 0:50:20 | 09:51:38 |
| 20km | 01:40:31 | 0:48:53 | 10:40:31 |
| 30km | 02:29:57 | 0:49:26 | 11:29:57 |
| 40km | 03:19:34 | 0:49:37 | 12:19:34 |
| Finish | 03:29:37 | 0:10:03 | 12:29:37 |
- ゴール後の歓喜の表情


それにしても、今回の結果はペーサーのラップがネットタイム基準で行ってくれたおかげで、給水でも一度も立ち止まらずにゴールまで走る余力があったのではないかと思います。ぺーサーの方、GJ !
そして、今年の春から取り組んだ走法のブラッシュアップ(重心少し先での接地と膝の脱力、お尻からハムストリングスに至る筋肉と背中の体幹主体でリラックスして体重を受け、ハムストリングスと脛で地面を引っぱったり、大腿筋と脚で後ろに蹴ったりしない)と、11月の成田ハーフ以降で模索してきた、肩甲骨からの腕振りの改善(体の軸を中心に回転させ、後ろに強くひき過ぎず前方に振り出して、すぐに抱え込み大腿の動作と連動させ補助する)、スピード練習と翌日のスタミナ練習(LSD)のセット練習の採用、シューズの選択(エピックリアクト・フライニット)など、総合的にうまく回った結果だと思います。
10月・11月は無理の無い範囲で200km以上走り込んできましたが、30km走は一度もせずに臨んでいます。
全てが良い方向の時でないと出せない結果ですので、もう次にサブ3.5で走れる気が全然しません。。
次のレースは1月下旬の館山若潮です。 タフなコースなので記録は狙えませんが、多くのラン仲間と一緒に楽しく走ってこようと思います。
